# JAKA通讯使用手册
# 介绍
为了帮助用户更好地使用JAKA的通讯功能,本手册介绍了节卡如何与市面上主流的PLC进行数据交互。本手册中的示例仅选用了部分型号,即使是同一厂商的PLC,由于通讯参数和设备版本的差异,使用方法不完全相同,因此本手册仅供初步使用参考,更进一步的使用请联系相应PLC品牌的本地供应商。
本次验证基于以下PLC型号,表中分别给出了使用的固件版本和上位机的软件版本,推荐在已经验证过功能的版本或更高版本使用。
| PLC型号 | 固件版本 | 软件版本 | |
|---|---|---|---|
| 罗克韦尔 | 5370 L3 1769-L33ER | 20.18 | RSLogix 5000 V20.00.00 (CPR 9 SR 5) |
| 西门子 | 6ES7317-2EK14-0AB0 | 3.2.18 | TIA Portal V16 |
| 三菱 | CPU:FX5U-80MT/DSS | 1.2450 | GX Works3 Version 1.090UEtherNetIPConfiguration Tool for FX5-ENET IP V1.00A |
| 扩展:FX5-ENET/IP | 1.1 | ||
| 施耐德 | TM241CE24R | 5.1.10.10 | EcoStruxure Mchine Expert Version 2.1 |
| 欧姆龙 | CPU:CP1H-X40DT-D | 1.3 | CX-Programmer 9.50 |
| 扩展:CJ1W-EIP21 | 3.0 | ||
| 基恩士 | CPU:KV-8000 | 2.602 | KV STUDIO 11.62 |
| 扩展:KV-XLE02 | 1.400 | ||
| 台达 | AS228T-A | 1.12.50 | ISPSoft Version 3.15COMMGR 1.12 |
| 汇川 | Easy522‑0808TN | 5.67.0.0 | Autoshop V4.8.1.0 |
JAKA设备的EtherNet/IP支持作为Adapter使用,Profinet支持作为Device使用,均为普遍意义上的从站,Modbus功能支持主从功能。由于Modbus RTU与Modbus TCP在使用流程上主要区别于连接参数,因此暂时仅对Modbus TCP进行验证,另外多数PLC厂商的Modbus主站通过梯形图触发通信,因此针对每家厂商未作重复验证。特定PLC型号未在教程中提及的通讯功能并不代表JAKA不支持,而是PLC并未集成此功能或验证困难。
# 环境搭建
节卡控制柜和PLC建立通讯后,PLC可以实时读取机器人的各项性能参数, 例如:机器人状态,各关节的角度、速度、温度,以及TCP的位置、速度和受力值,同时,PLC也能通过不同类型数据的寄存器与控制柜进行数据交互。
设备间的简易连接示意如下,需要保证PLC、上位机和控制柜在同一网段内,下文所述的使用方法和步骤均基于三者之间可互相访问。
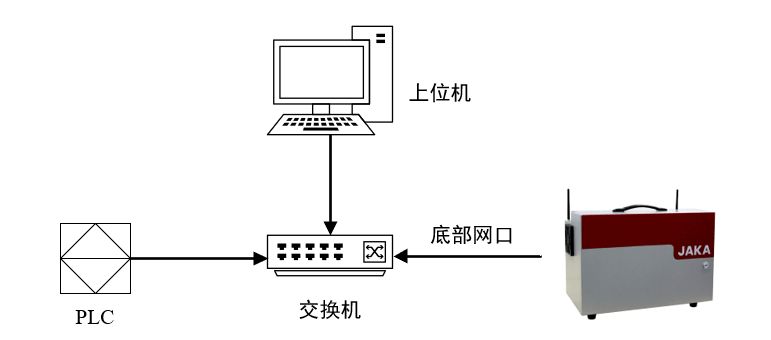
节卡控制柜通讯功能建议使用控制柜的底部网口,JAKA Zu APP(下文简称APP)也可以通过底部网口与控制柜连接,但为了避免APP与控制柜的数据传输影响通信功能,建议APP使用面板上网口或WIFI与控制柜相连。
注:底部网口需要处于处于激活状态(连上电脑或路由器),才能使用相关通信功能。
# 使能EtherNet/IP,Profinet
由于Ethernet/IP及Profinet使能步骤基本一致,因此一并说明。
默认情况下,Ethernet/IP及Profinet功能处于关闭状态,使能的具体步骤如下:
步骤一:打开最新版本JAKA Zu APP,点击APP右上角的”未连接“图标进入机器人连接界面。
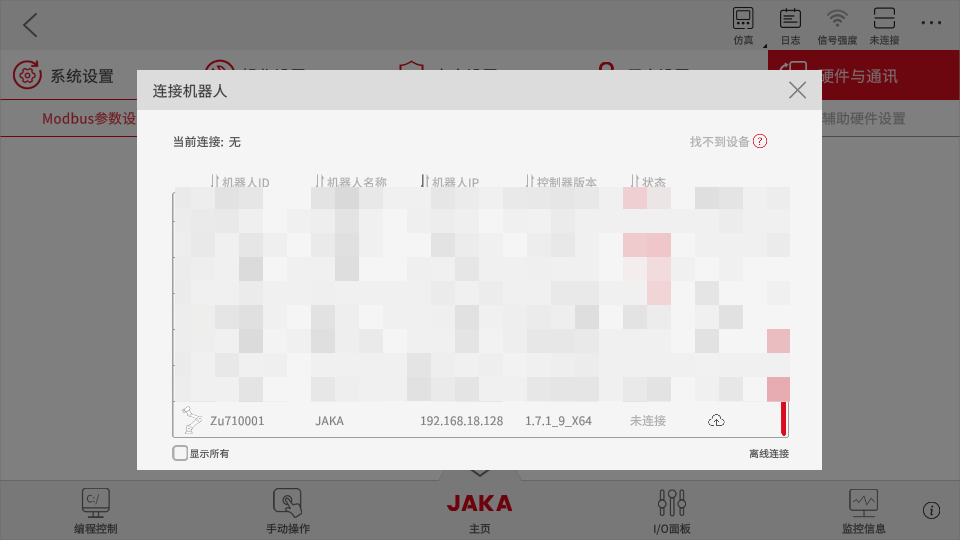
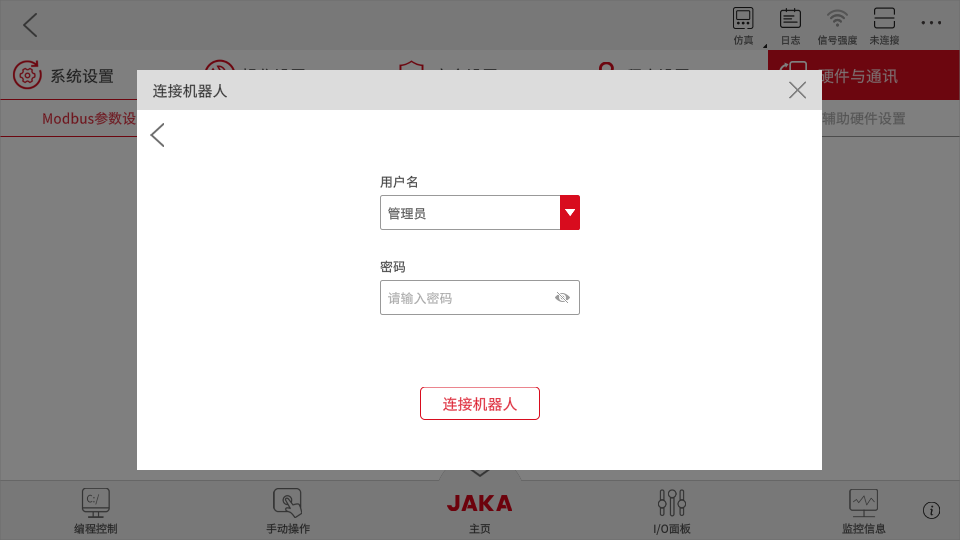
步骤二:点击想要连接的机器人并输入管理员密码(默认密码为jakazuadmin)使APP与控制柜相连。
步骤三:在APP界面, 点击“设置”→“硬件与通讯”→“Ethernet/IP设置”或“Profinet设置”, 开启使能开关,并点击“确定”,手动重启控制柜。重启控制柜步骤如下:
a. 回到主界面,点击”关闭本体电源“→位于界面右上角的”关闭“按钮,关闭控制柜;
b. 控制柜关闭后,短按手柄开机按钮,待蜂鸣器响后,控制柜开机;
c. 打开JAKA Zu APP,重新连接机器人,具体操作见步骤一和步骤二;
d. 进入主界面,点击“打开本体电源”。
重新连接控制柜后可在“EtherNet/IP设置”或“Profinet设置”界面查看状态。状态为“未成功连接主站”,则EtherNet/IP已成功使能,等待主站连接。

# 使能 Modbus TCP/IP,Modbus RTU
由于Modbus TCP/IP及Modbus RTU使能步骤基本一致,因此一并说明。
默认情况下,Modbus TCP/IP及Modbus RTU功能处于开启状态,使能的具体步骤如下:
步骤一:打开最新版本JAKA Zu APP,点击APP右上角的”未连接“图标进入机器人连接界面。
步骤二:点击想要连接的机器人并输入管理员密码(默认密码为jakazuadmin)使APP与控制柜相连。
步骤三:在APP主页, 点击“设置”→“硬件与通讯”→“Modbus设置”。
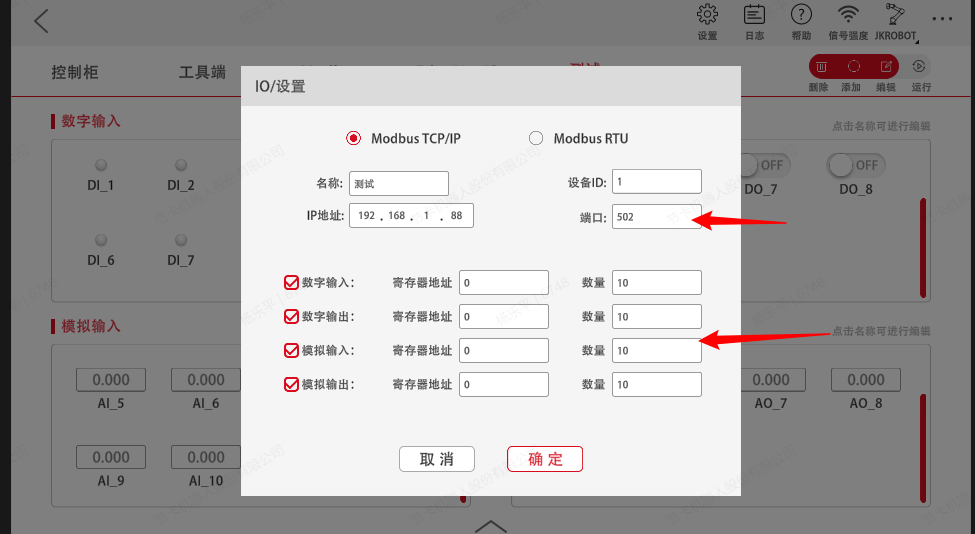
a. 若开启Modbus TCP/IP,则勾选Modbus TCP/IP前的单选按钮,输入端口号(0~65535),点击“确定”;
b. 若开启Modbus RTU,则勾选Modbus RTU前的单选按钮,输入从站节点号(1~128),选择波特率、数据位长度、停止位长度、校验方式,点击“确定”。

# IO数量配置说明
# EtherNet/IP
在地址分配表中,数据类型排列的顺序为:DIO布尔型、AIO整型和AIO浮点数型。其中:
DIO:布尔型,占1位(bit),每8个DIO组成一个字节,因此DI和DO的IO数量配置需为8*n个,n为正整数,使对应的DI和DO数据长度为整数字节,
AIO:整型和浮点数型均占4个字节(byte)。
按照使用场景,EtherNet/IP的IO数量是可配置的。在usersetting中,如果Mode = 0,代表EIP使用标准的IO数量,如果Mode = 1,代表可以配置IO数量。
scanner需要导入eds文件以与控制器的adapter匹配,目前JAKA提供以下eds文件,其含义和应用场景分别为:
# JAKARobot.eds
标准版的eds文件,参数不可配置不可修改,为固定值,具体IO数量定义在usersetting中:
[EIP]
Enable = 1
Mode = 0
DI_NUM = 64
DO_NUM = 64
AI_INT_NUM = 24
AI_FLOAT_NUM = 24
AO_INT_NUM = 24
AO_FLOAT_NUM = 24
其中DO和AO输出的数据长度总和最大为204个字节, DI和AI输入的数据总长度总和最大为492个字节。
# JAKARobotSetup.eds
定制版本的eds文件,IO数量可以配置,需要在控制器内将usersetting的mode改为1,再修改IO数量。
其中DO和AO输出的数据长度总和最大为492个字节, DI和AI输入的数据总长度总和最大为492个字节。
# Profinet
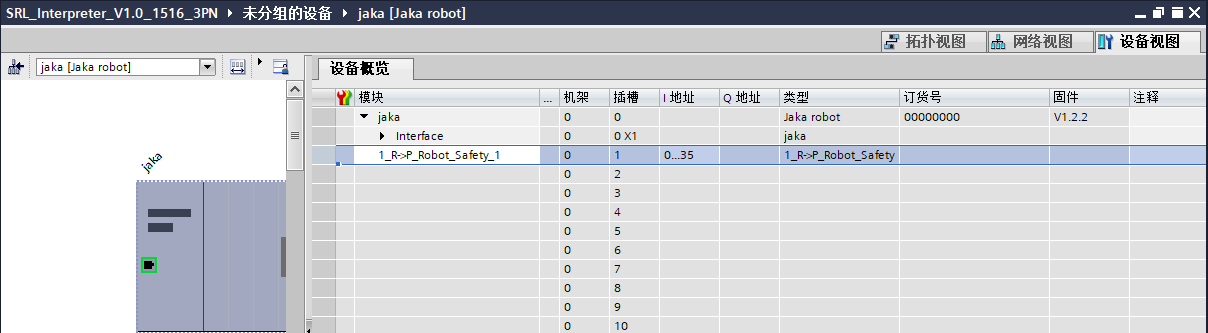
节卡机器人Profinet IO数据传输操作,请参考节卡机器人地址分配表,由4个表组成,分别是表格说明、Robot2PLC、PLC2Robot以及脚本函数。在Robot2PLC和PLC2Robot表中定义的每个数据占4个字节,即0 ~ 31 位,重点内容如下:
传输类型: R->P (Robot->PLC)或者传输类型 P->R(PLC->Robot),表明了数据传输的方向;
单元模块(Unit Group): 表明了数据类型和所属模块,数据类型为:机器人状态、安全设置,属于第一个模块。比如:1_R->P_Robot_Safety, 代表数据模块编号为1,传输方向R->P (Robot->PLC),Robot表示机器人状态,Safety表示安全设置,32 字节为已使用地址,4 字节为预留地址。 其他的单元模块内容与此类似。
PLC设置: 包括各个单元模块对应的插槽、子插槽编号和PLC上地址,如1_R->P_Robot_Safety对应1号插槽,1号子插槽,PLC输入I地址为0 ~ 35 字节。
# PLC通讯实例
# 罗克韦尔5370 L3 1769-L33ER
所需软件:RsLinx Classic,BOOTP-DHCP Server,RsLinx Classic Launch Panel,RsLogix 5000,JAKA Zu APP,Wireshark(非必须)
# EtherNet/IP
在不清楚PLC当前IP地址的情况下,可以使用Wireshark确认PLC的IP地址,使用windows自带的cmd工具ping设备以测试PLC是否处于组网中。如果与控制器和上位机不在同一网段内,请跳至步骤二,尝试修改PLC的IP地址;如果已经处于同一网段内,则至步骤四继续执行。
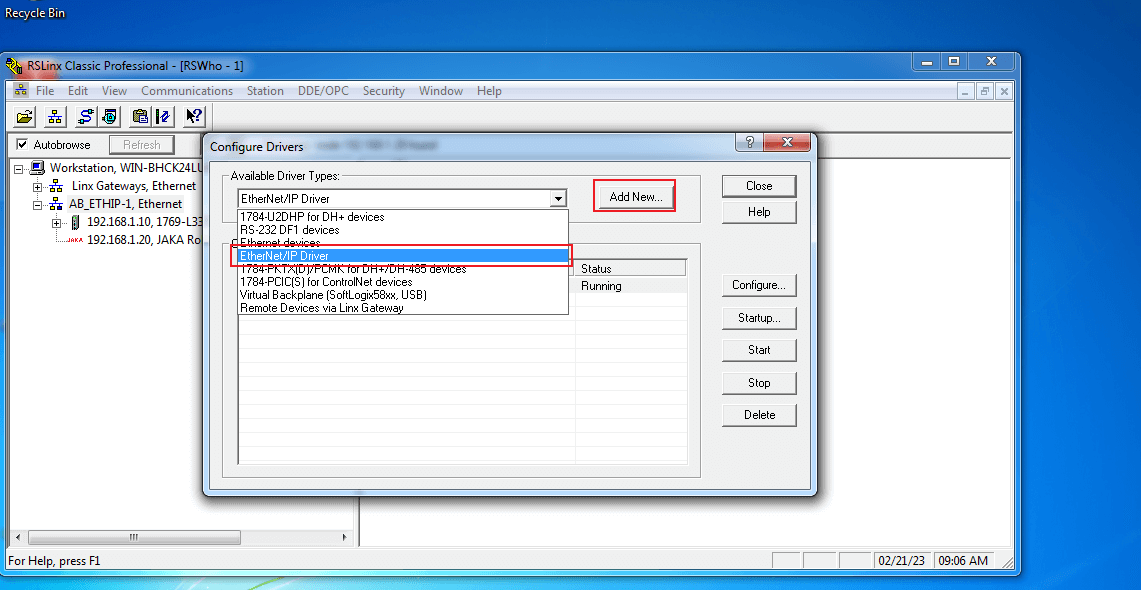
打开软件RsLinx Classic,点击Configure Drivers菜单,在弹出的对话框中, 选择Ethernet/IP Driver, 点击Add New,按照默认配置,完成后点击Ok。
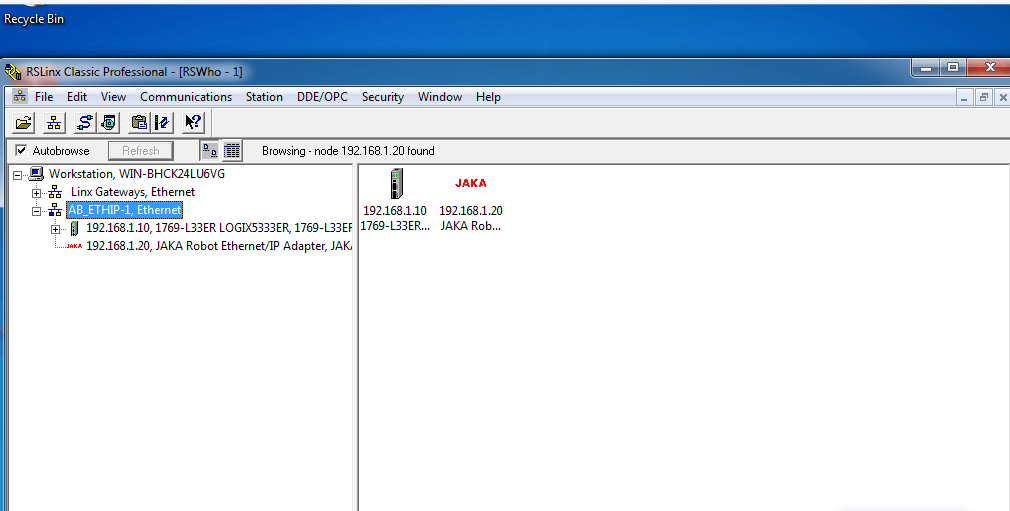
点击网络节点图标,弹出WRWho对会话框。点击ABETHIP_1,会刷新出PLC和Ethernet/IP的模块信息,连接正常表示已正确组网。右键点击PLC可以修改其IP地址,使其与控制器和上位机处于同一子网段内。
- 打开BOOTP-DHCP Server软件,将自动搜索与电脑连接的设备。
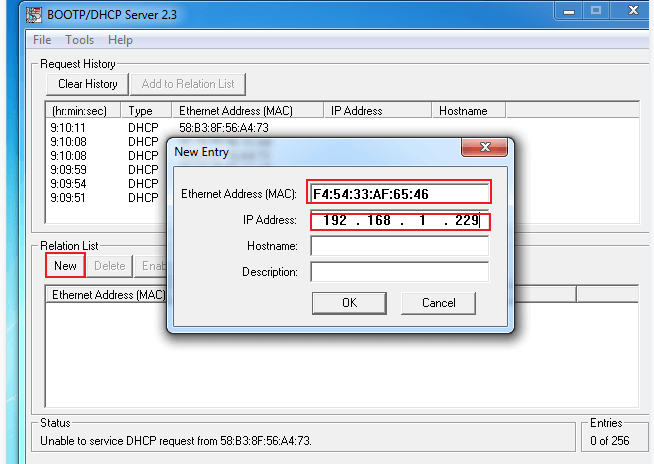
注:如自动搜索未发现PLC的MAC地址,请关闭电脑的防火墙功能,手动输入MAC地址。在下半栏选中IP地址,然后点击Disable BOOTP/DHCP。
- 打开RsLinx Classic Launch Panel软件, 点击Start。

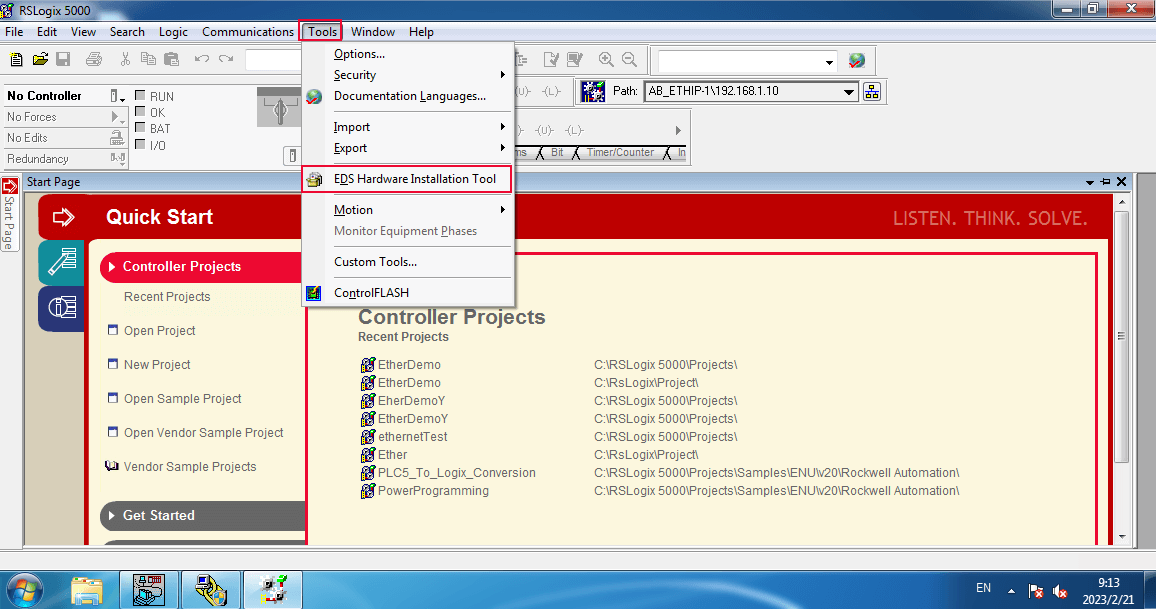
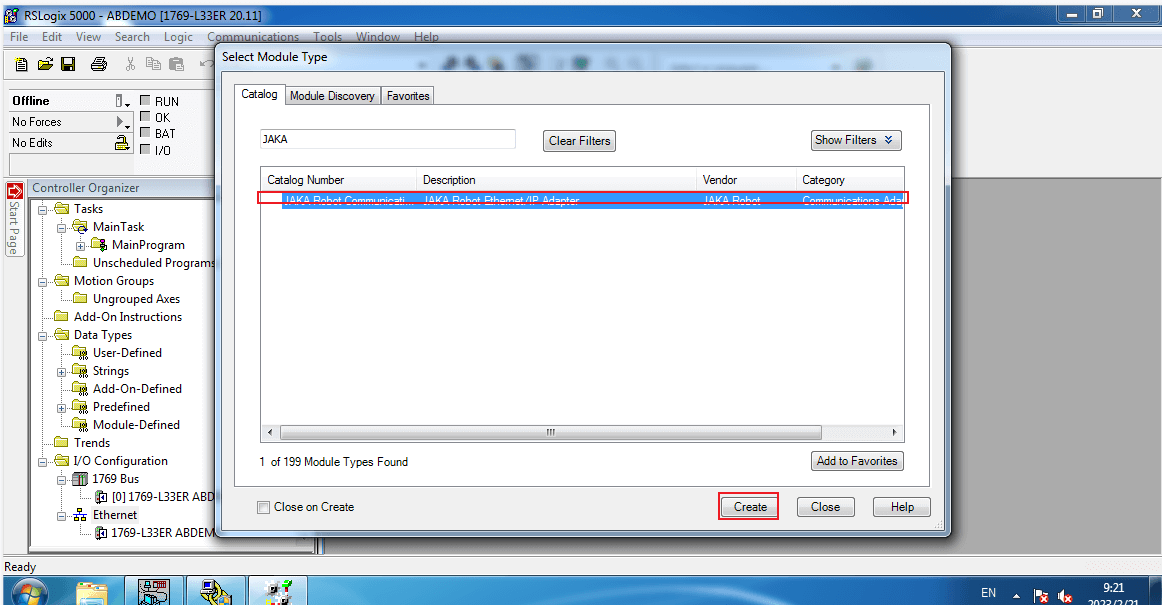
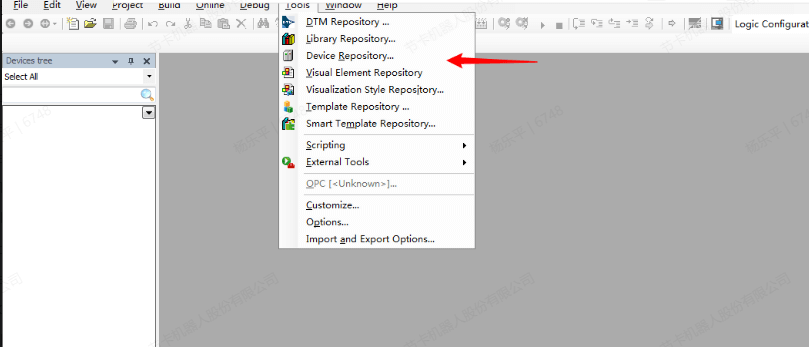
- 点击菜单栏Tools,选择安装EDS文件,注册EDS文件, 一直点击下一步,直到完成配置。
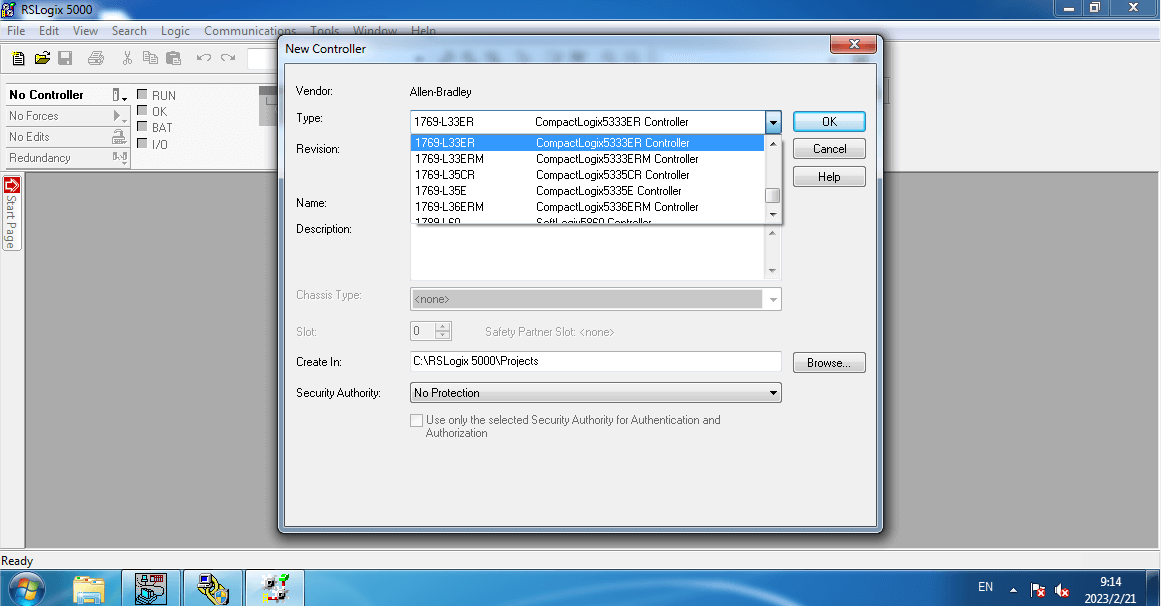
- 打开RsLogix 5000软件,创建新项目。选择所使用的PLC型号,输入项目名称,浏览项目保存位置,点击确认。
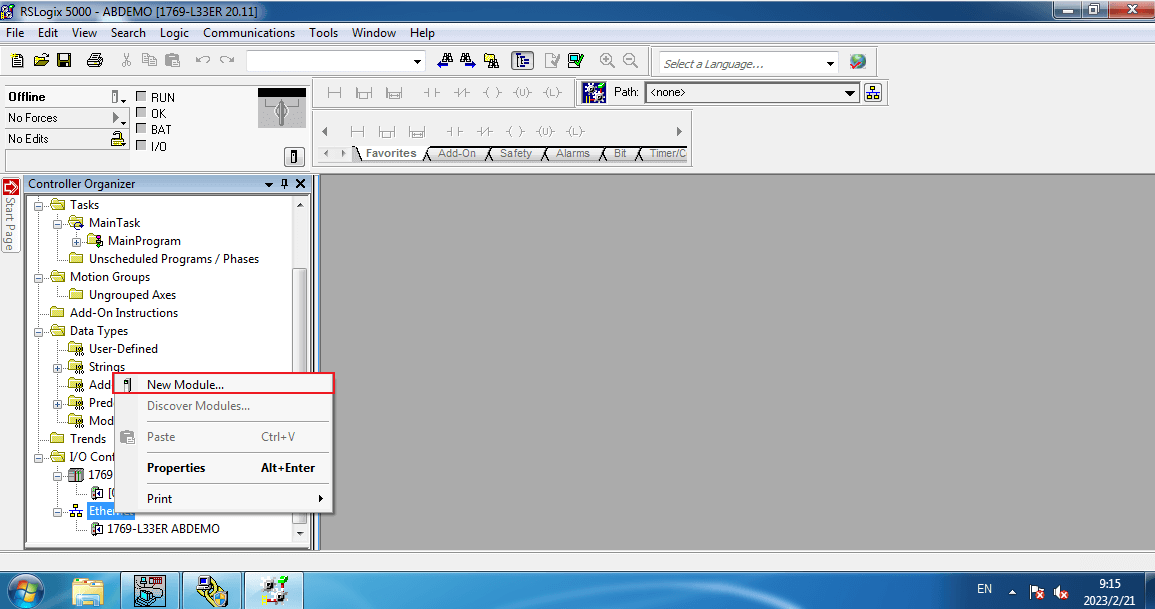
- 在左侧栏右键点击以太网,选择新建module,在弹出的窗口中找到模块JAKA Ethernet/IP Adapter, 点击创建,输入模块名称,注意此处IP地址需要与控制柜的Ethernet/IP地址相同。
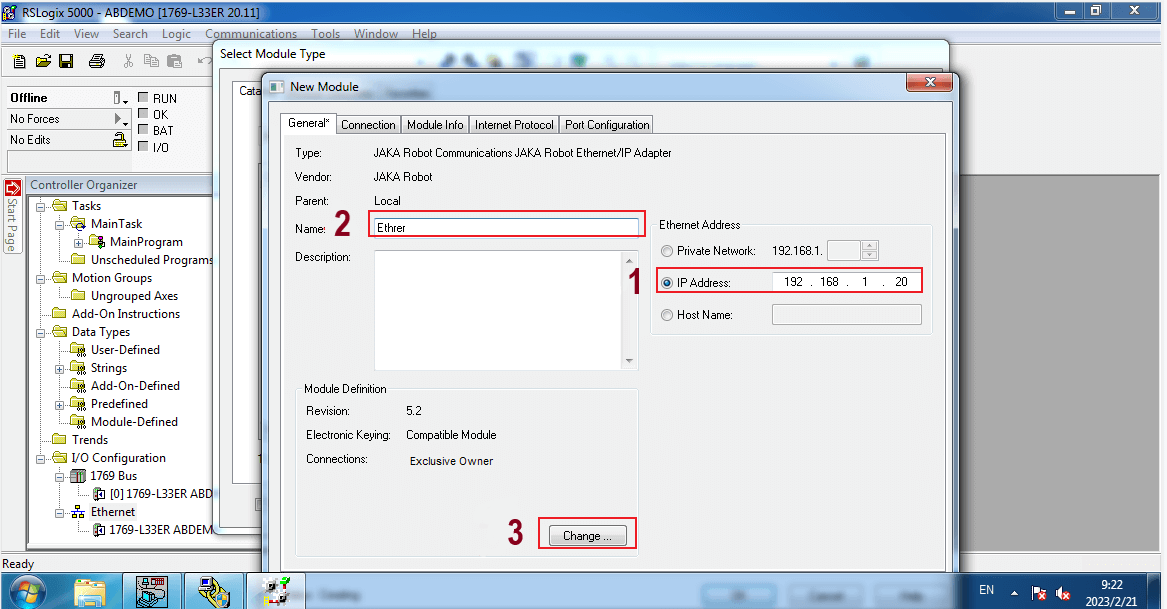
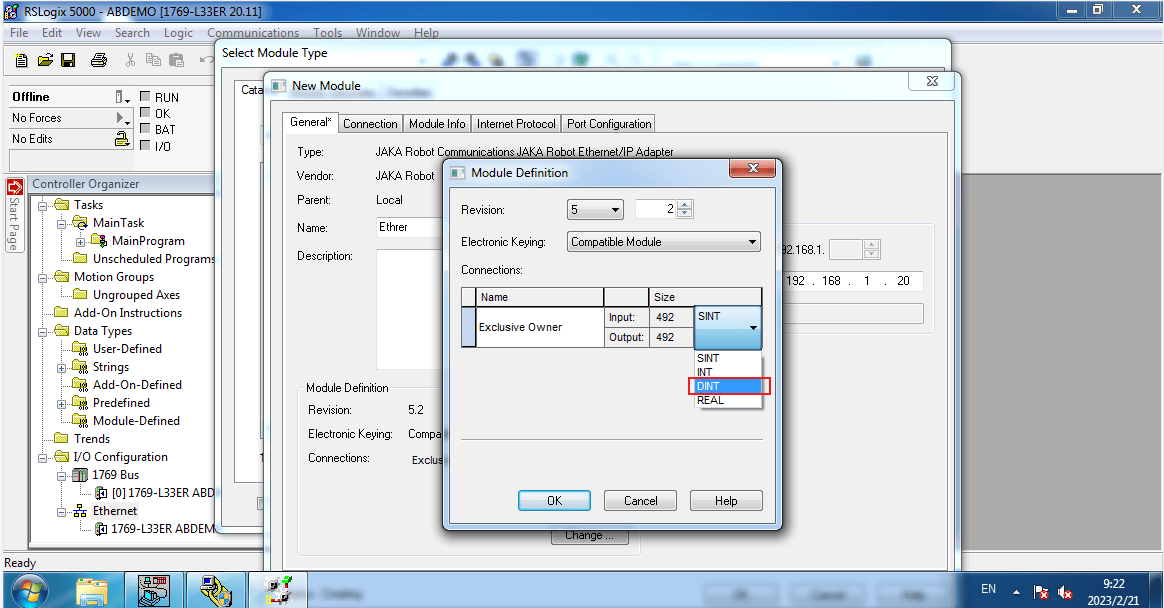
- 点击更改按钮,可设置数据的类型,为了便于数据显示,这里选择DINT类型。
注:如果使用定制版本,需要手动配置EIP的模块,则配置如下:
PLC到EIP的输出ID为100
EIP到PLC的输入ID为101
PLC输出最大字节数为492字节
PLC输入的最大字节数为492字节
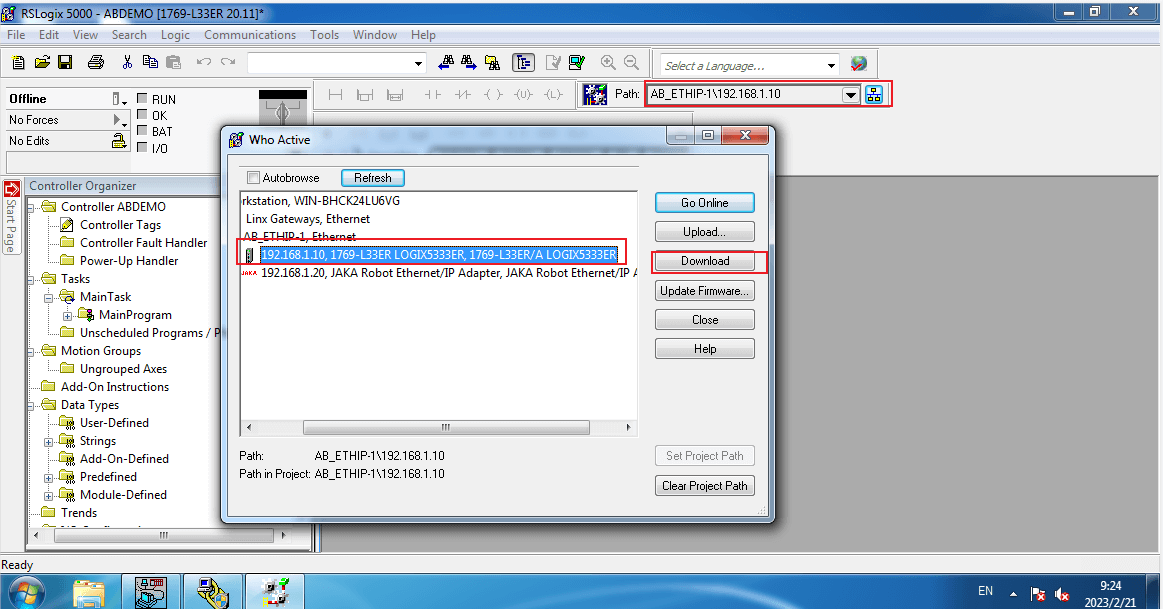
- 点击网络节点,弹出活动页对话框,选择 PLC模块, 然后点击联机,弹出对话框,下载程序。
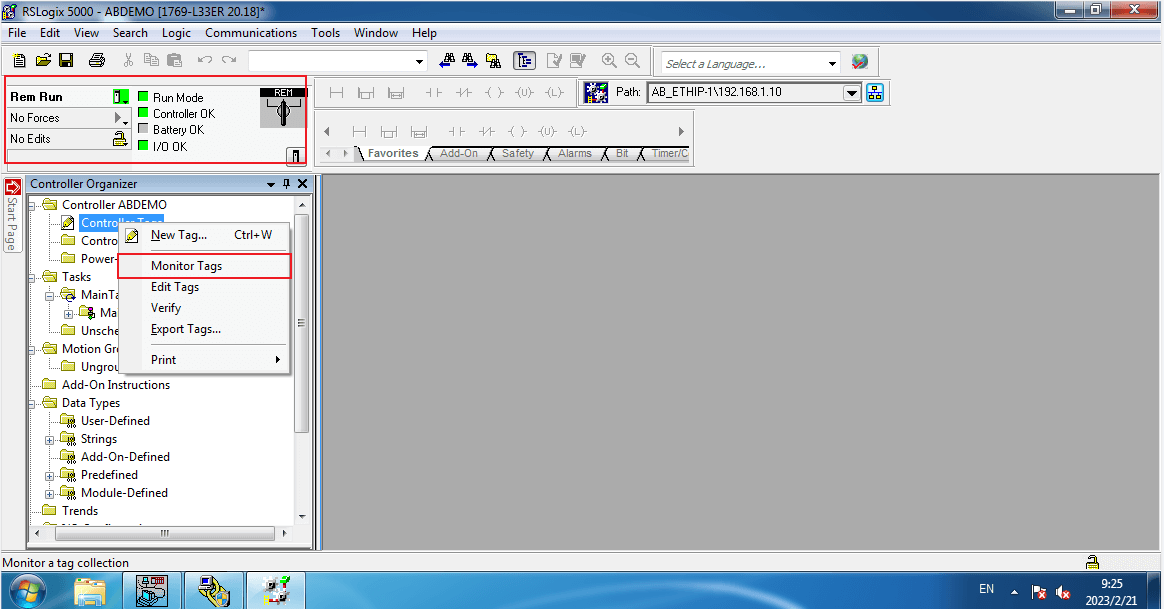
- 选择联机,使PLC处于运行模式,连接状态正常之后,右键点击控制器标签,选择监控Tag,可以看到PLC从机器人读取到了部分数据。
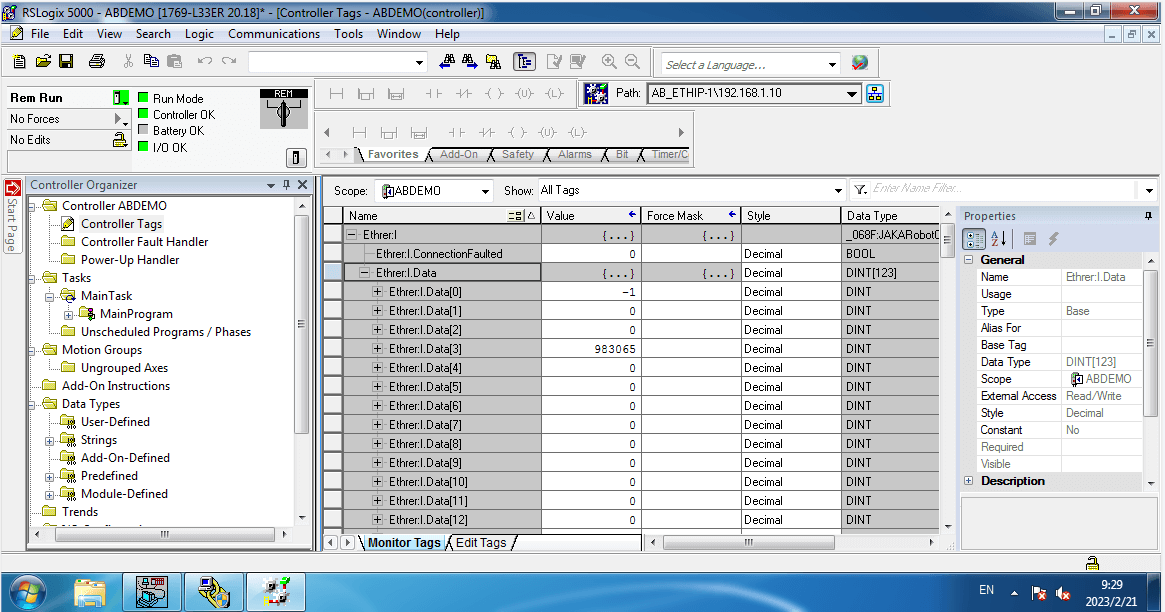
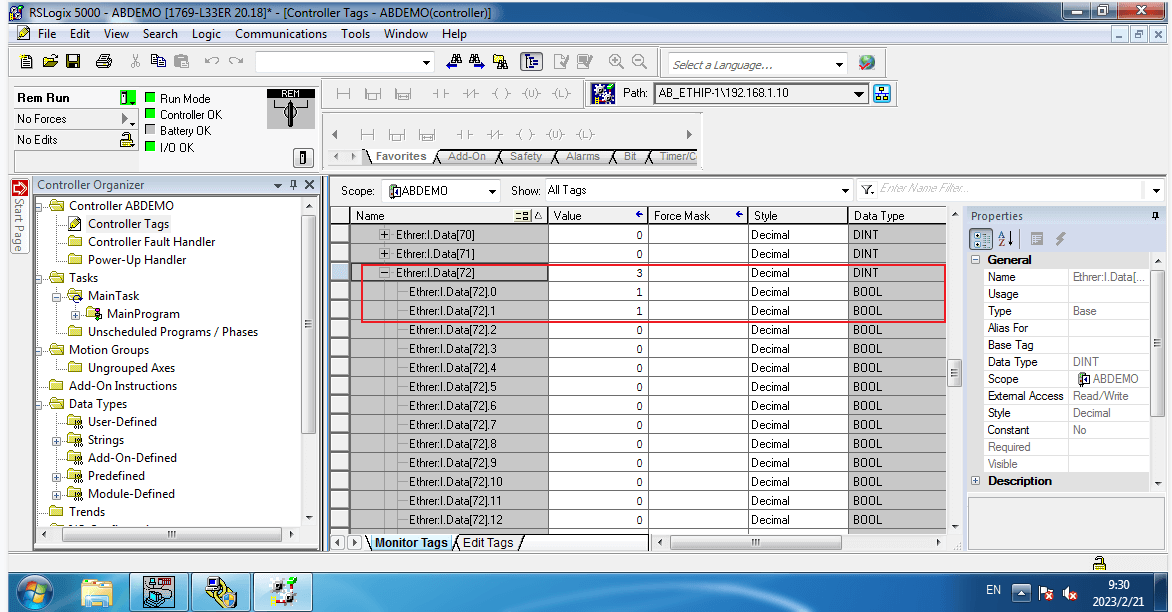
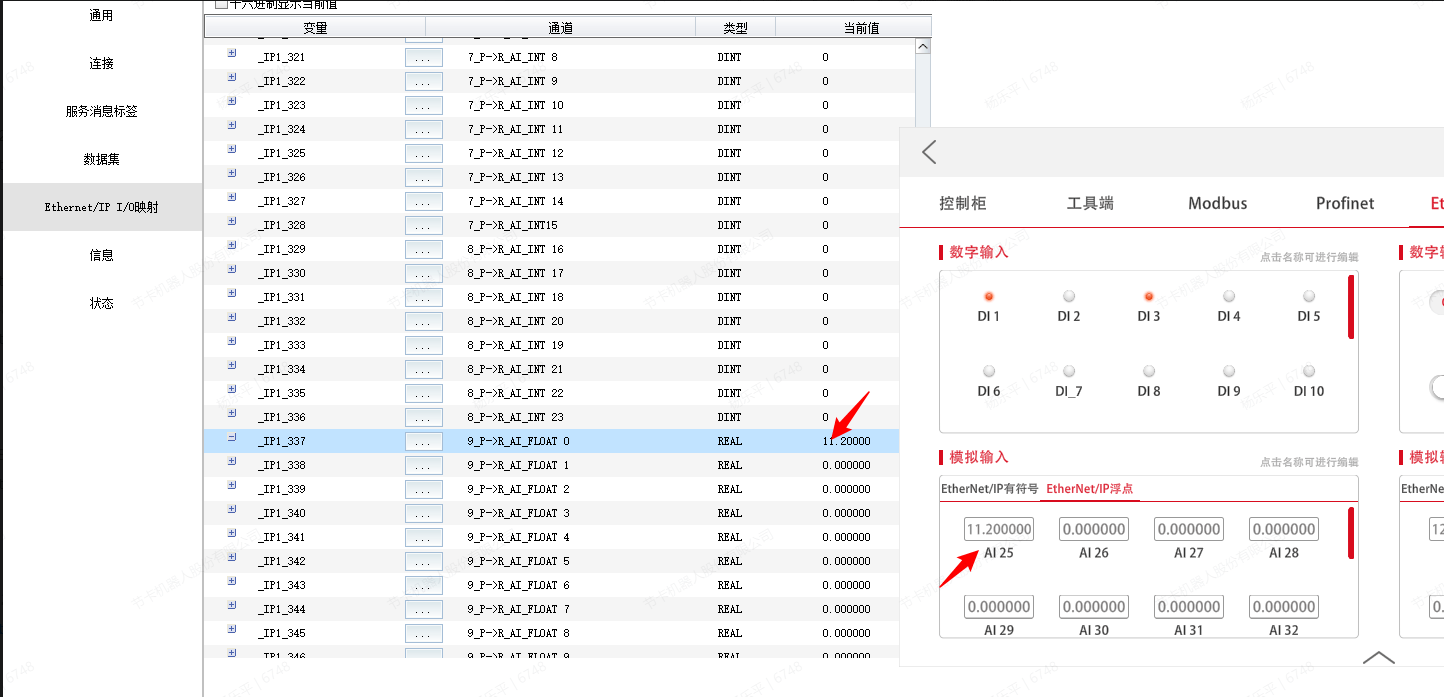
- 在APP上打开Ethernet/IP数字输出DO1和DO2按钮,设置整数 AO1为123。
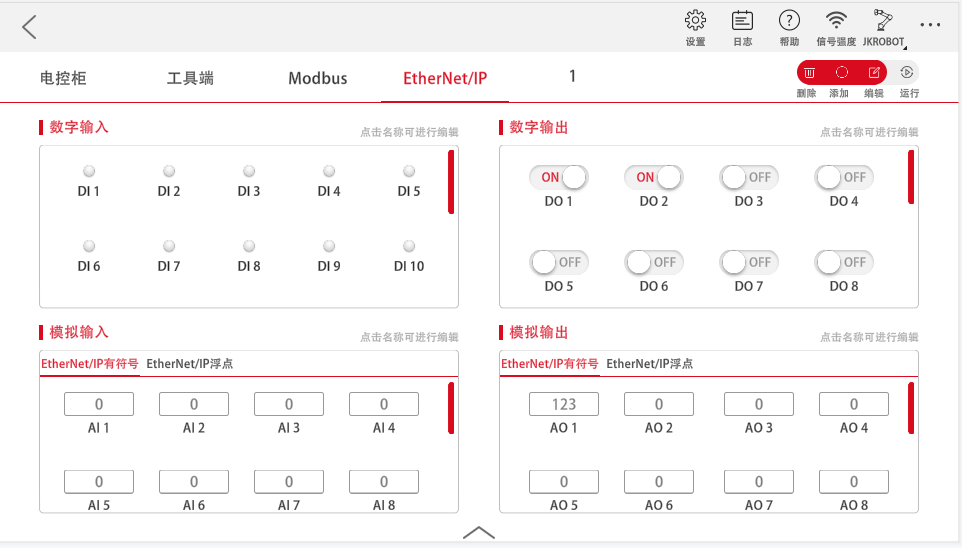
- 查看RsLogix 5000相应的数据,,I.Data[72]和I.Data[75]显示相应的数据正确。数据的地址可参考文件节卡机器人EthernetIP地址分配表确定。
# Modbus TCP
# 主站
AB的PLC自身均不支持Modbus TCP通讯,使用AB PLC需要配第三方的协议转换网关将ModBusTCP协议转换为AB自己的Ethernet/IP协议。因此罗克韦尔PLC首先必须有具备EtherNet/IP协议的以太网接口。
从Logix5000编程软件15版本(实测20版本及以上)以后,对于CompactLogix和Controllogix系列的PLC,支持了使用PLC程序编写出来的ModbusTCP协议通讯,并且可作为Master和Slave与其他第三方设备进行通讯,AB官方提供的例程分为Master和Slave两部分,可按需分别使用。Master功能部分可能会占用PLC内200-230K的存储空间,Slave功能部分可能会占用PLC的280-300K空间
由上可知,罗克韦尔不支持原生的Modbus TCP协议,需要通过其EtherNet\IP的以太网端口实现。
可以自行编写PLC程序来支持Modbus,也可在罗克韦尔下载示例程序,下面对官网给出的示例程序作简要验证。
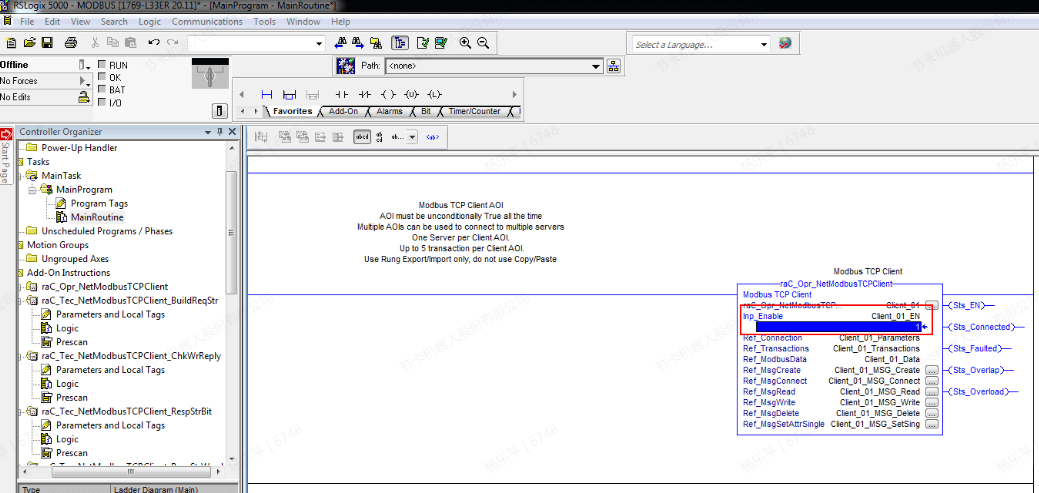
- 新建工程,选择MainRoutine,在右侧的空白区域点击右键选择Import Rungs
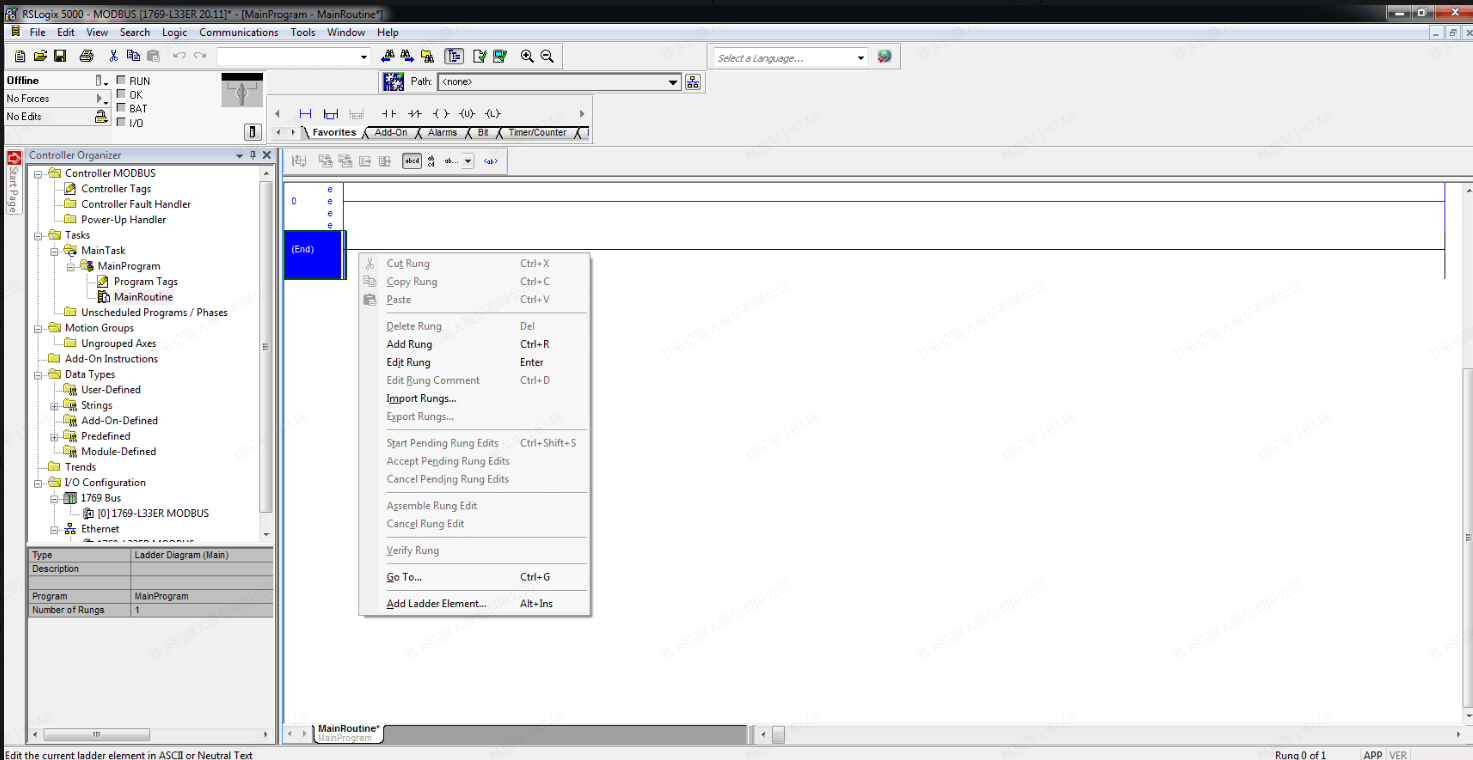
导入示例程序中的.L5X文件,可以修改程序内参数的名称,通过Tags标签的Final Name选项。
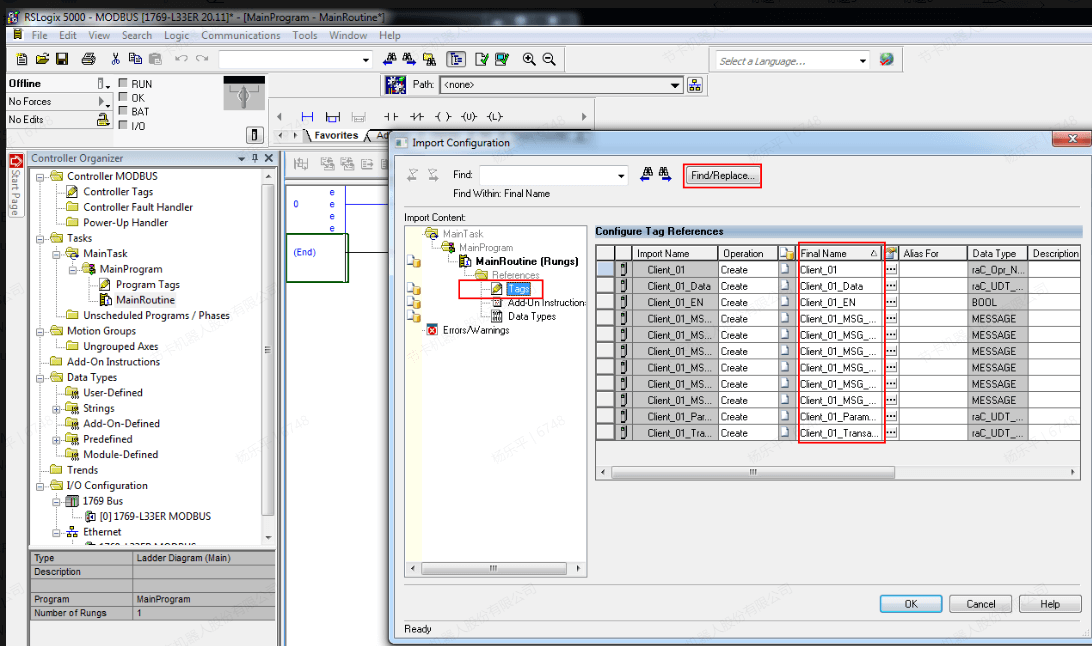
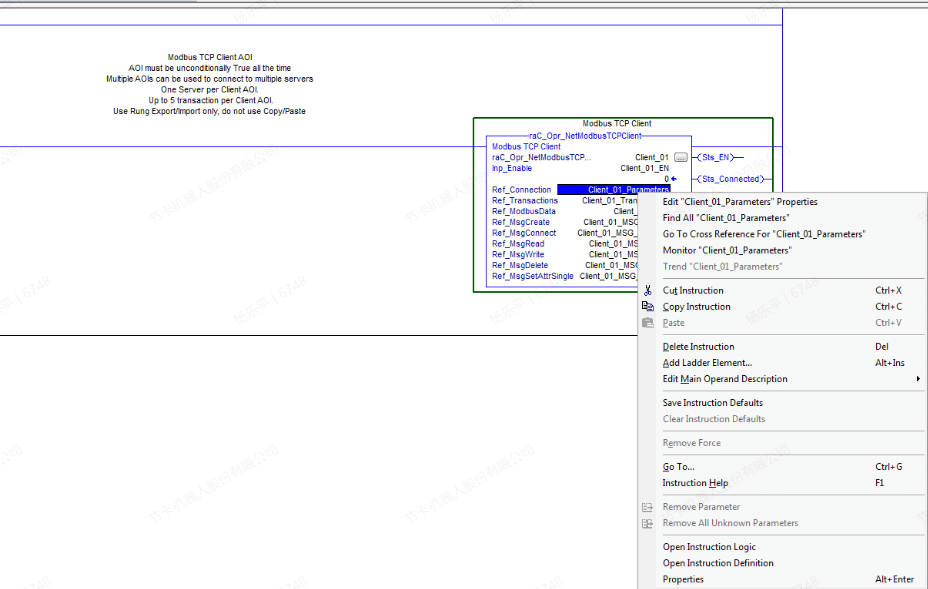
点击ok导入,在Modbus TCP Client块内右键点击,选择Monitor。
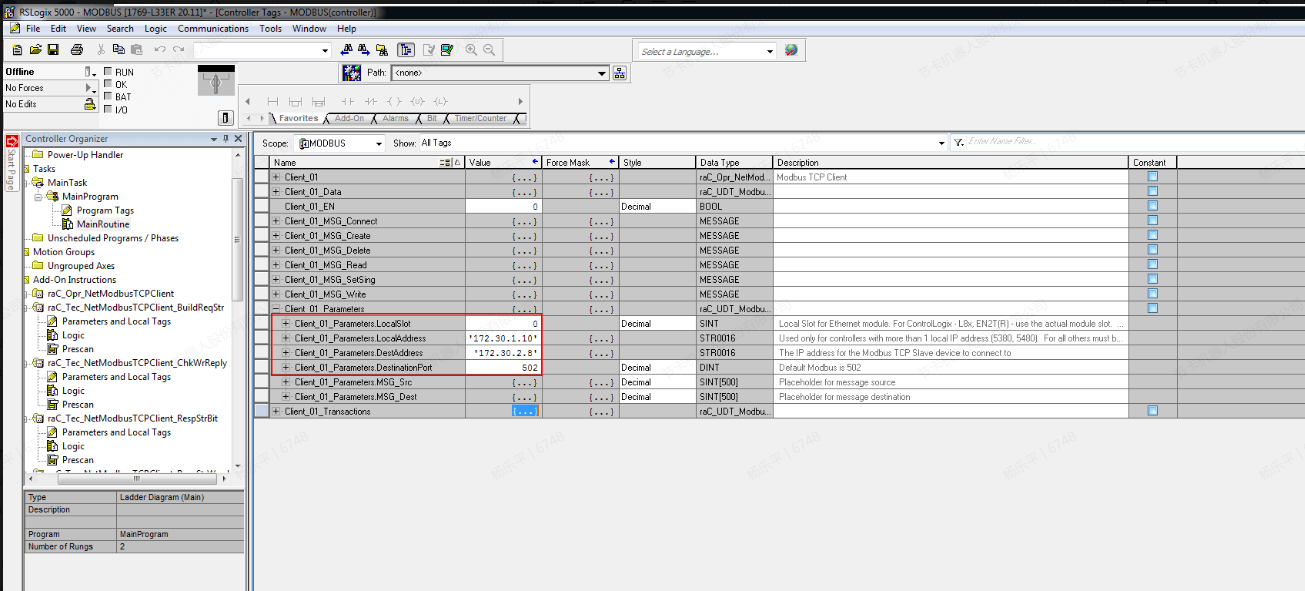
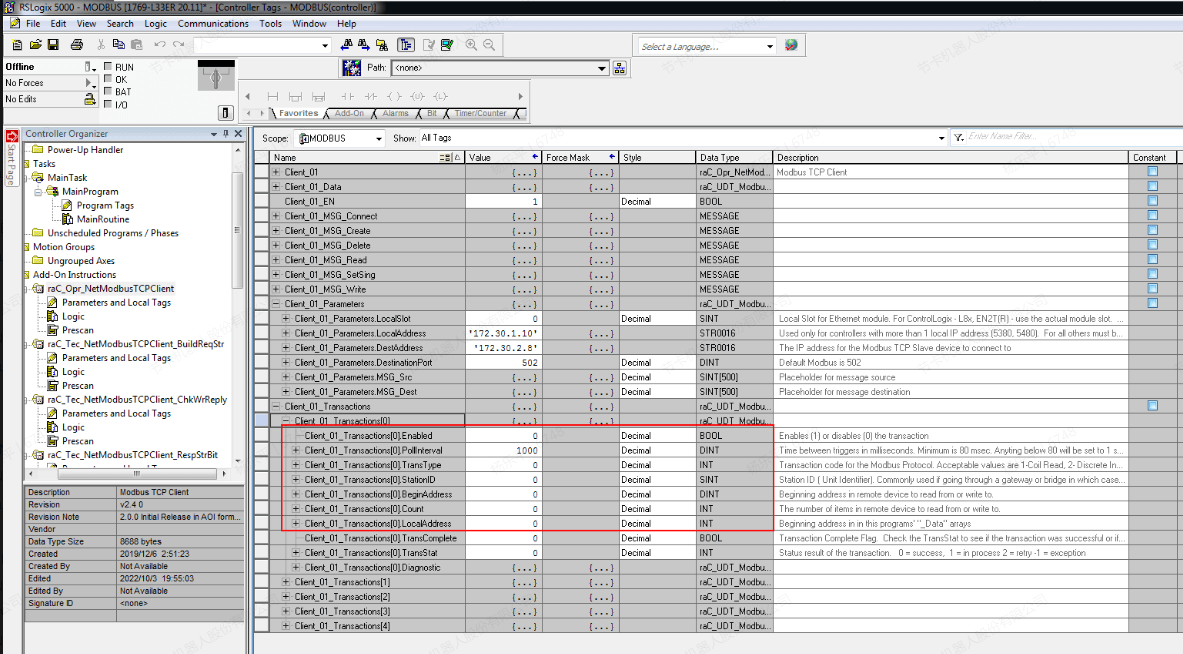
- 对于5370系列而言,LocalSlot的值为0,将其他条目如EtherNet/IP的端口地址、Modbus从站的ip地址和端口号按实际进行填写
- 回到MainRoutine选项,将inp_Enable置为1,代表启动Modbus Client功能,对于RSLogix 5000而言,同时需要将程序编译并下载到PLC,最后切换到运行状态
- 监控表可以设置Pollinterval(刷新时间)、Transtype(功能码)、Stationid(从站ID)、BeginAddress(起始地址)、Count(地址数量)等基本参数,此外还需要设置LocalAddress,此参数代表与Modbus Slave的起始地址对应的Modbus Client的起始地址。
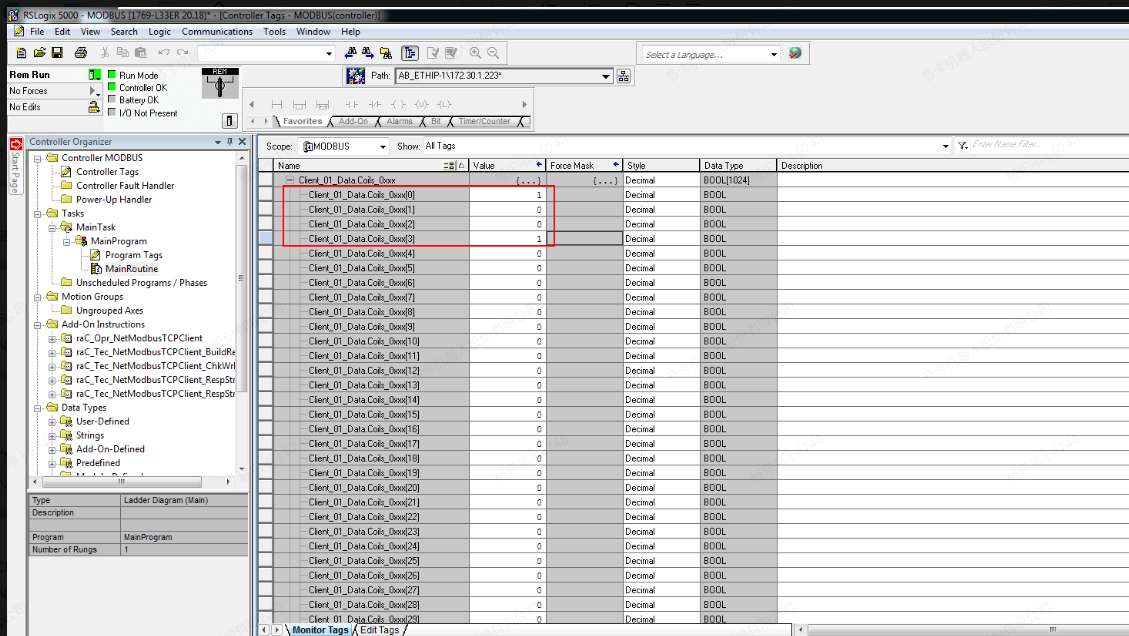
- Modbus Client同样使用4个寄存器存放数据,完成起始地址的映射后,可以直接修改寄存器内的数据,如此处将Slave的起始地址设为了40,修改coils下的数据可以发现,成功更新到了控制器的内部
# 西门子 6ES7317-2EK14-0AB0
所需软件:TIA Portal V15,JAKA Zu APP
# Profinet
- 打开TIA Portal V15软件,点击创建新项目,弹出新建项目窗口后,更改项目名称(如jakaPNIO),然后点击浏览按钮,选择存储位置并确定,再点击创建,此时已经新建了一个项目并保存在了指定的路径下

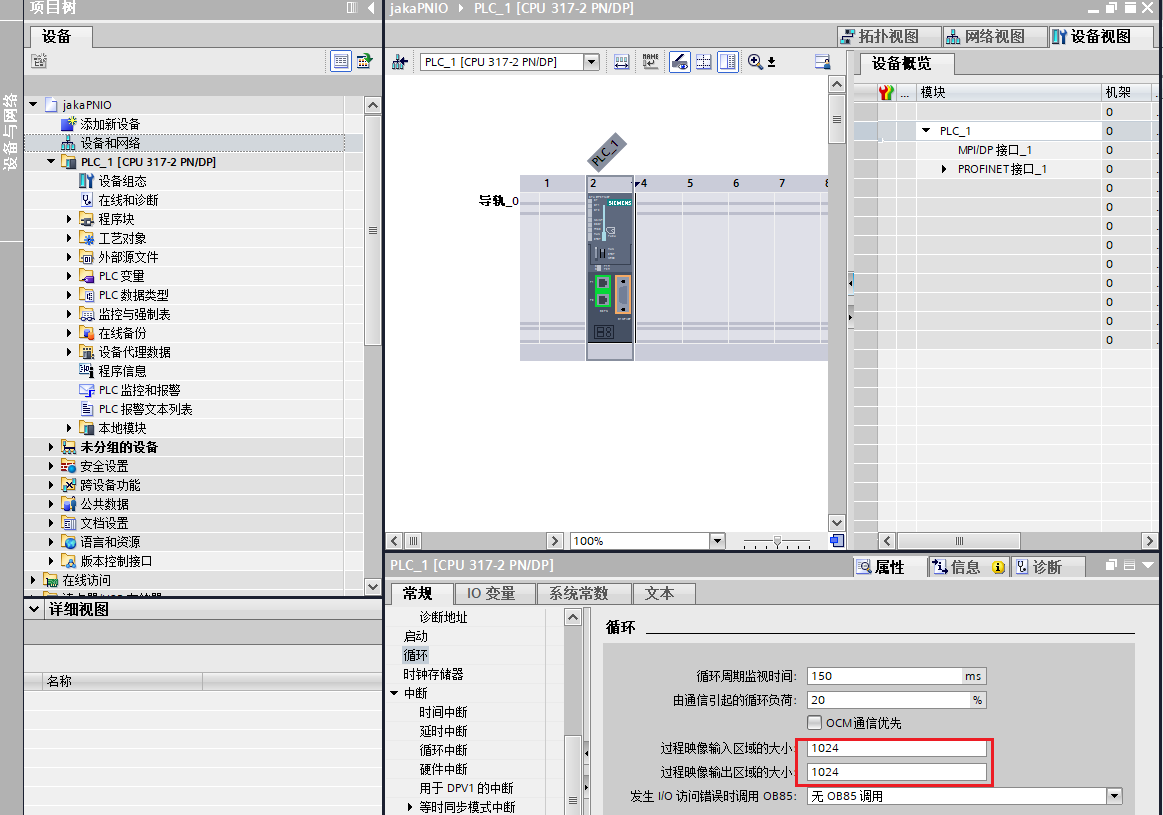
在建立的项目窗口中,依次点击设备与网络->添加新设备->控制器, 选择PLC的型号,再点击添加

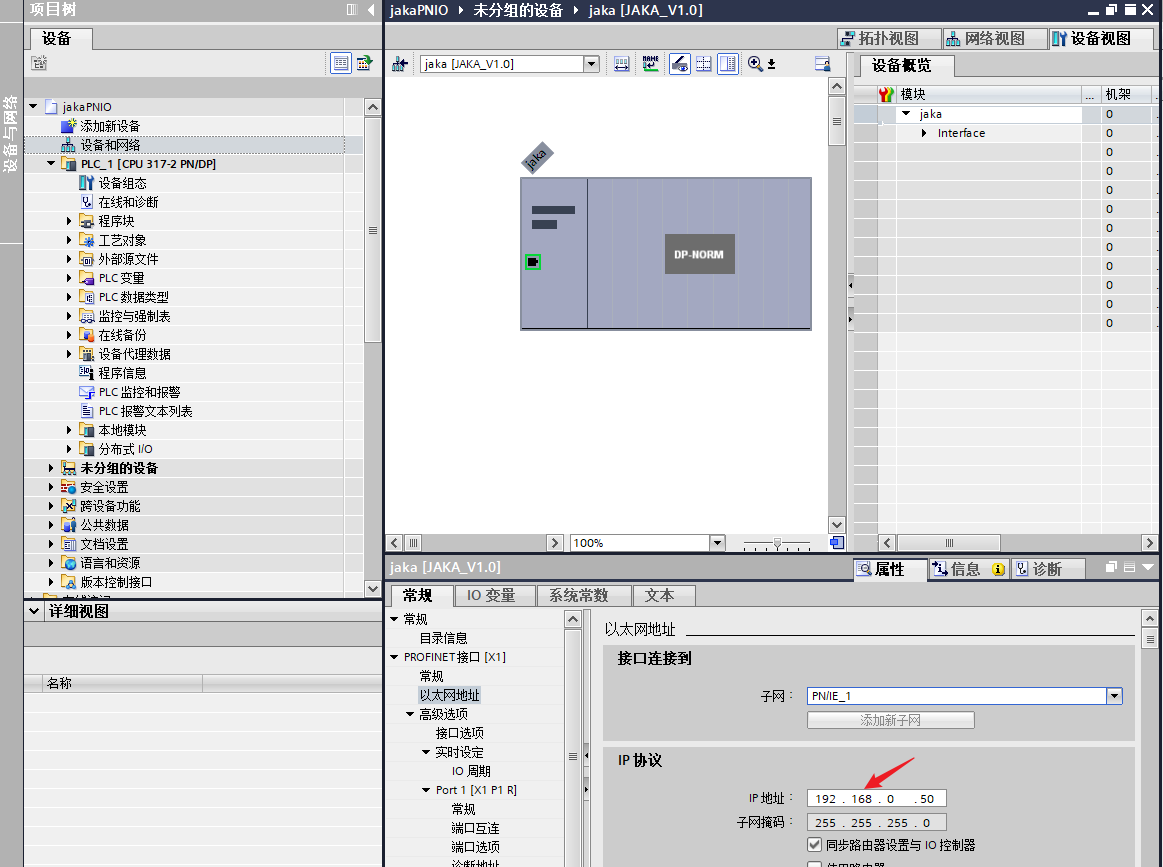
双击PLC模块,在常规的菜单下点击以太网地址,修改PLC的IP地址

- 如果使用了PLC S7-300则需要修改IO地址映射的大小,使地址映射值大于688字节,IO地址映射小于此值可能会导致数据丢失,因为我们Profinet IO的最大地址范围为0到688字节。
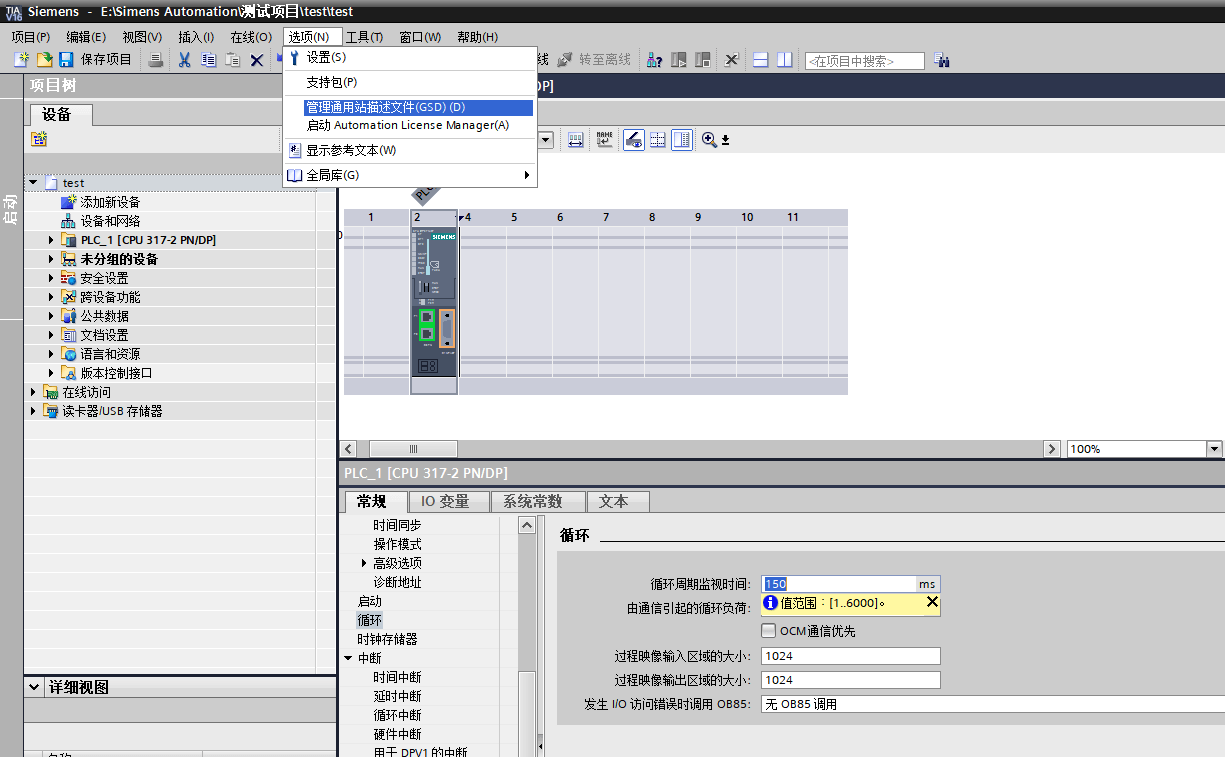
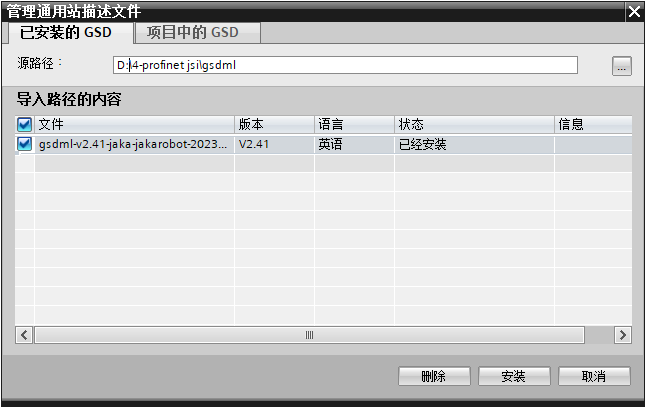
- 在菜单栏选项菜单中,点击管理通用站描述文件(GSD),弹出相应的窗口,点击浏览按钮,找到文件GSDML-V2.41-JAKA-JAKARobot-20210722.xml的路径,载入后选中该文件,然后安装, 等待安装完成,关闭窗口
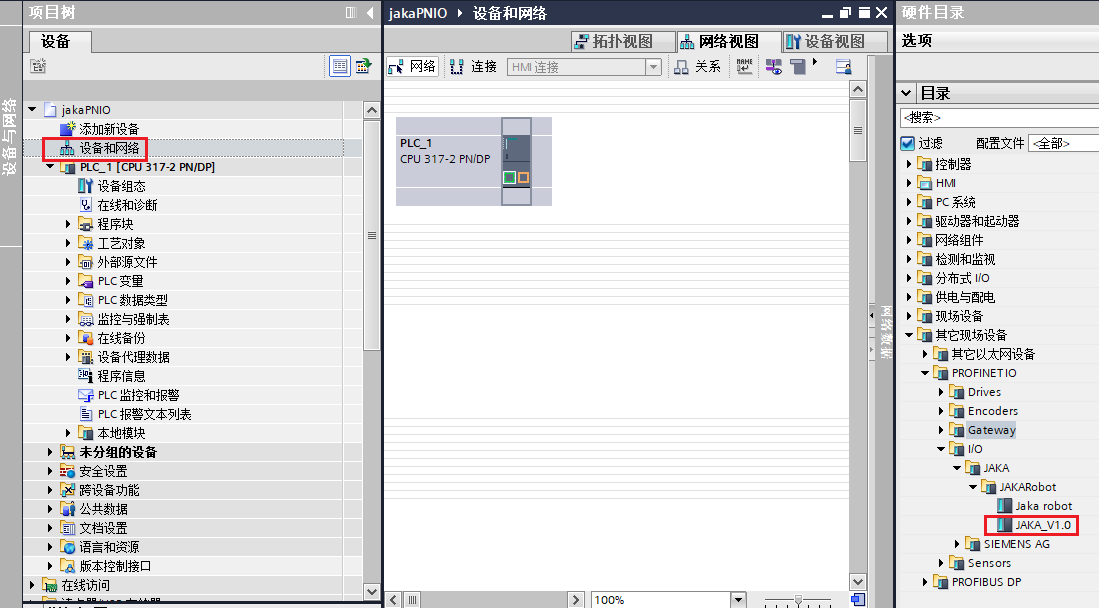
- 在左侧栏双击设备和网络,在右侧栏硬件目录,点击其他现场设备,选择PROFINET IO, 找到JAKA_V1.0, 双击或直接拖到界面即可
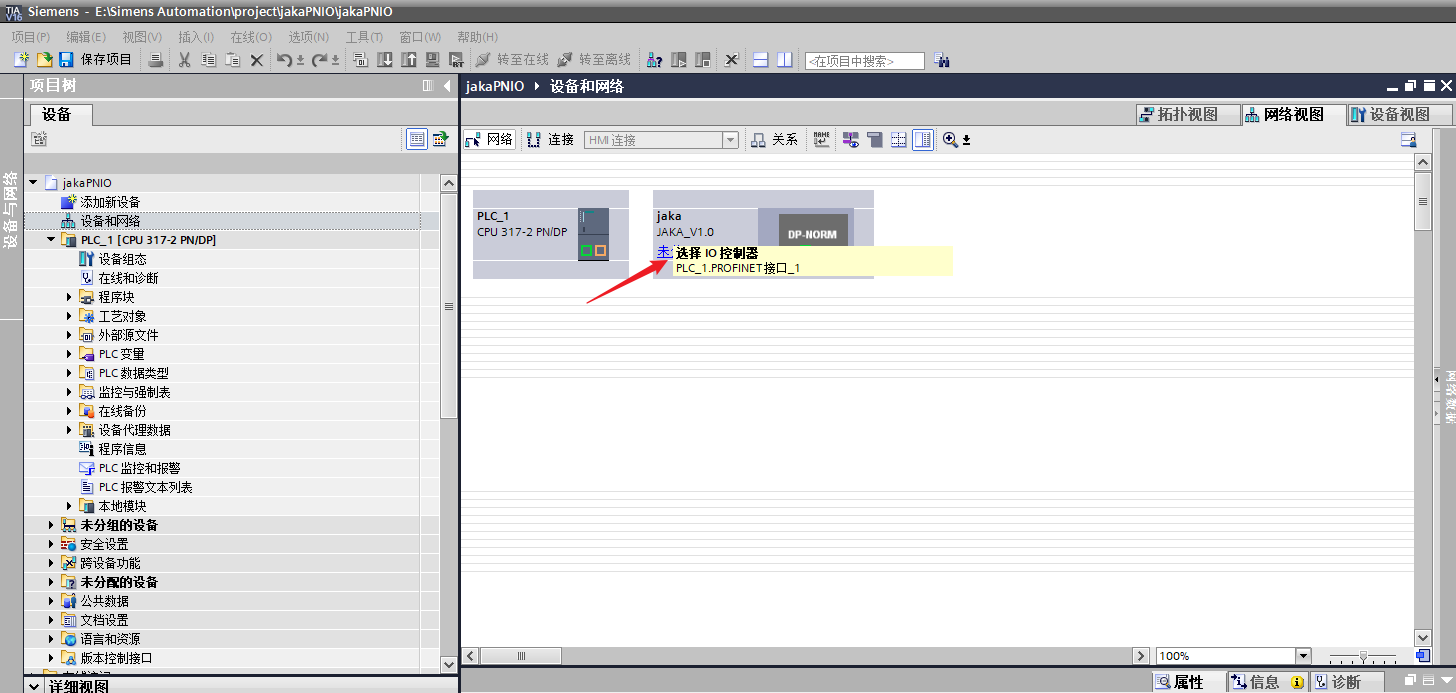
- 点击Profinet设备的未分配,选择PLC_1.PROFINET接口_1
- 单击Profinet设备DP-NORM图标,在下方的菜单栏中选在以太网地址,修改Profinet设备的IP地址。
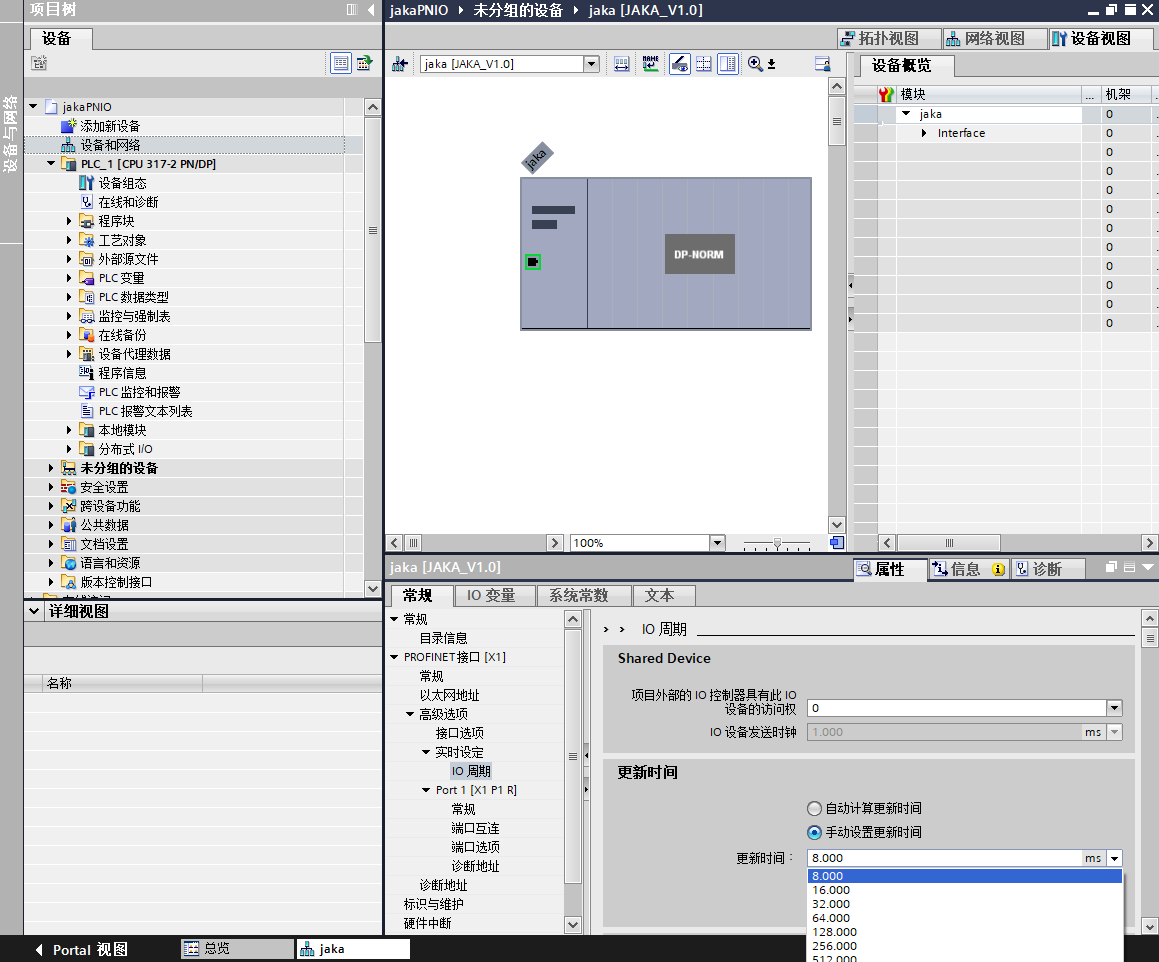
- 点击IO周期,在更新时间的区块选择手动设置更新时间,在更新时间的下拉框中更选择Profinet的数据更新时间,由于此设备的最小更新时间为8ms,所选择的数值应该大于或等于8ms。
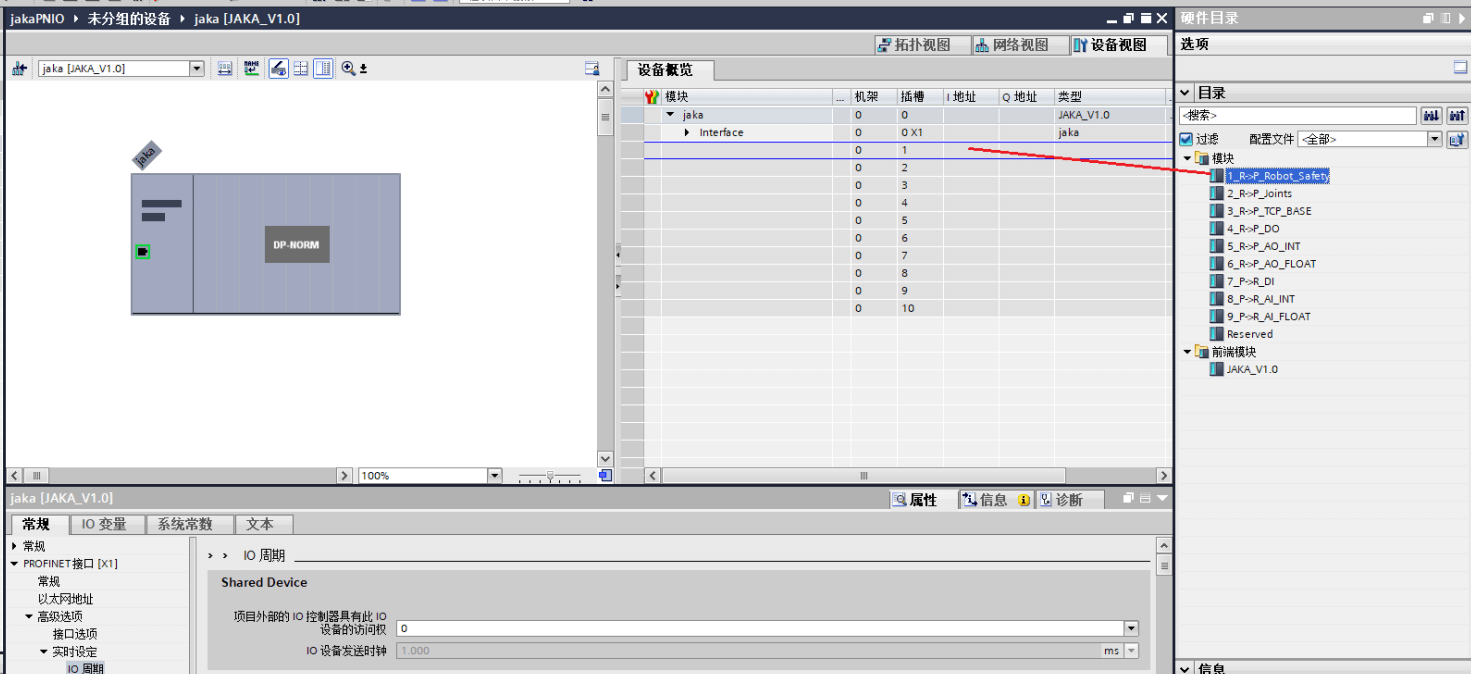
- 双击名为jaka的Profinet设备,切换到硬件设备概览的页面,在硬件目录的模块下能看到被定义的各IO数据块。将数据块拖入到对应的插槽中。
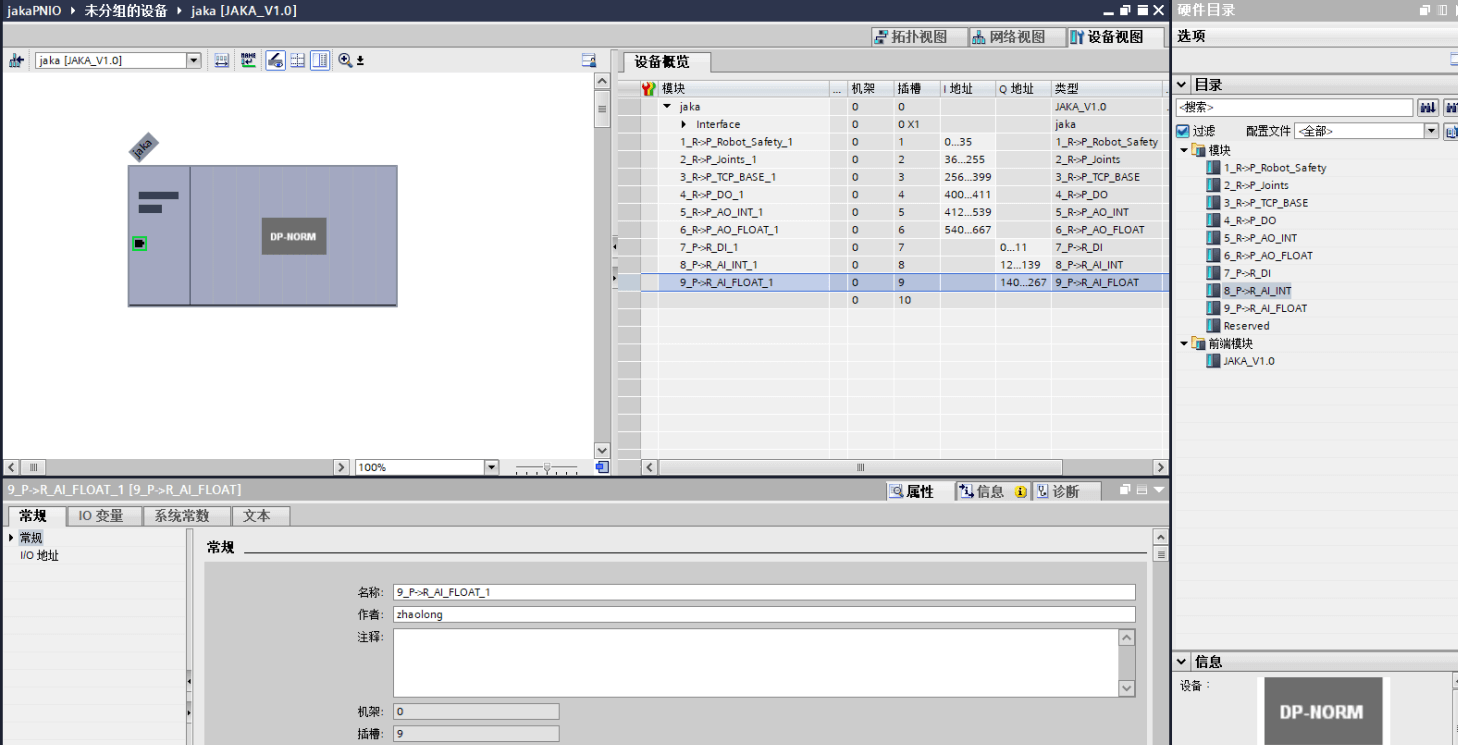
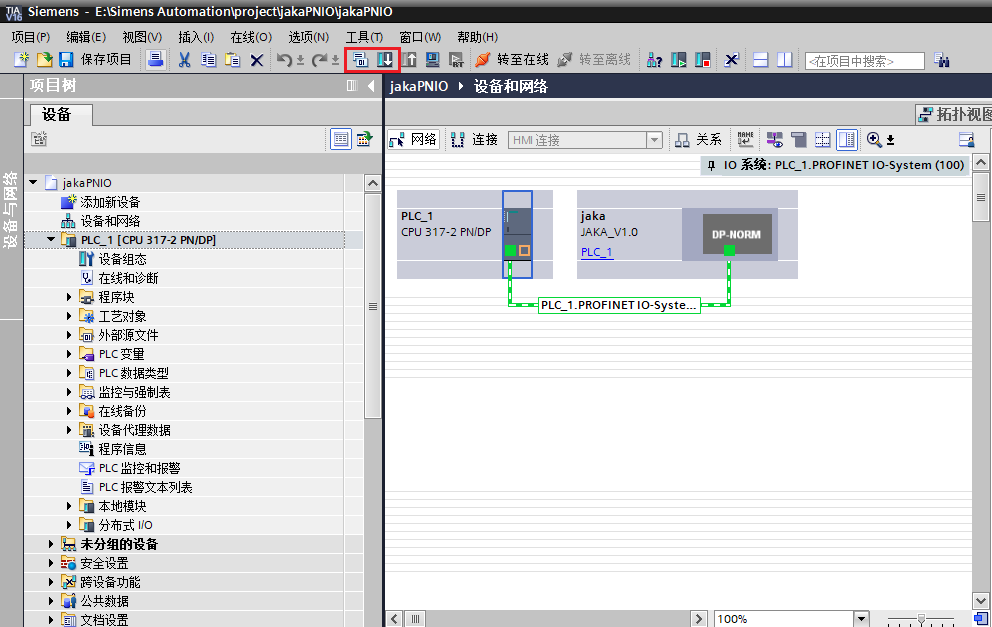
11.切换到设备和网络界面,选中PLC,依次选择编译和下载的图标。
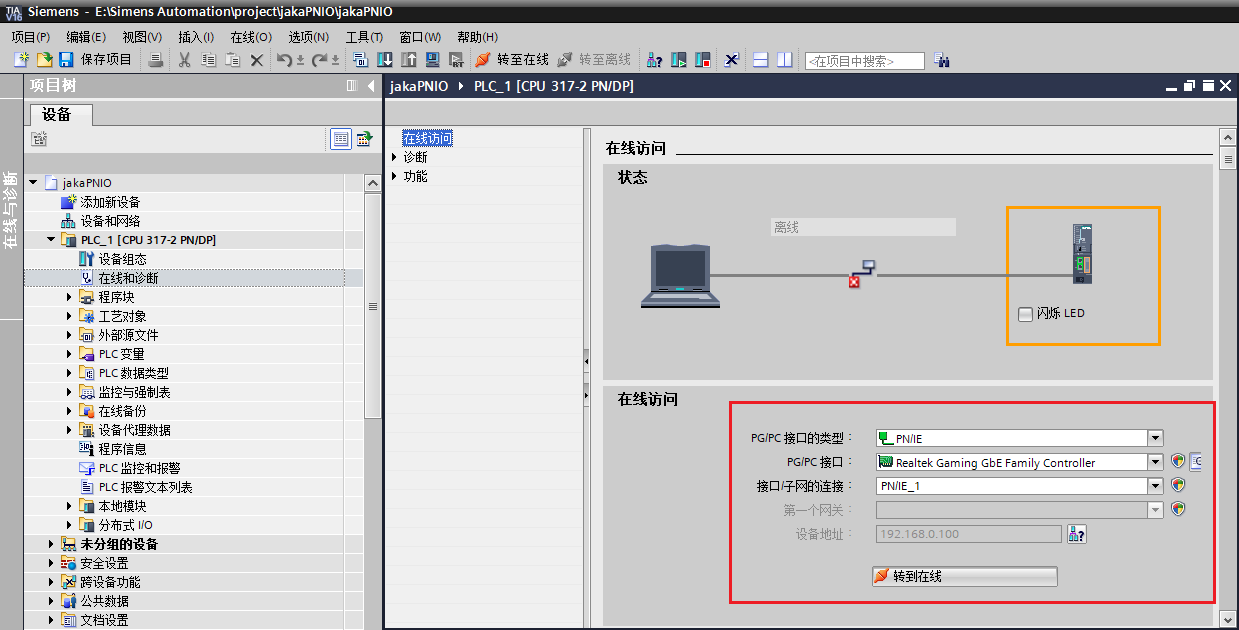
- 双击左侧栏在线和诊断,在线访问的配置如下,然后点击转至在线, 即可观察PLC与Profinet连接情况,以及实现PLC和Profinet实时数据传输的观察。
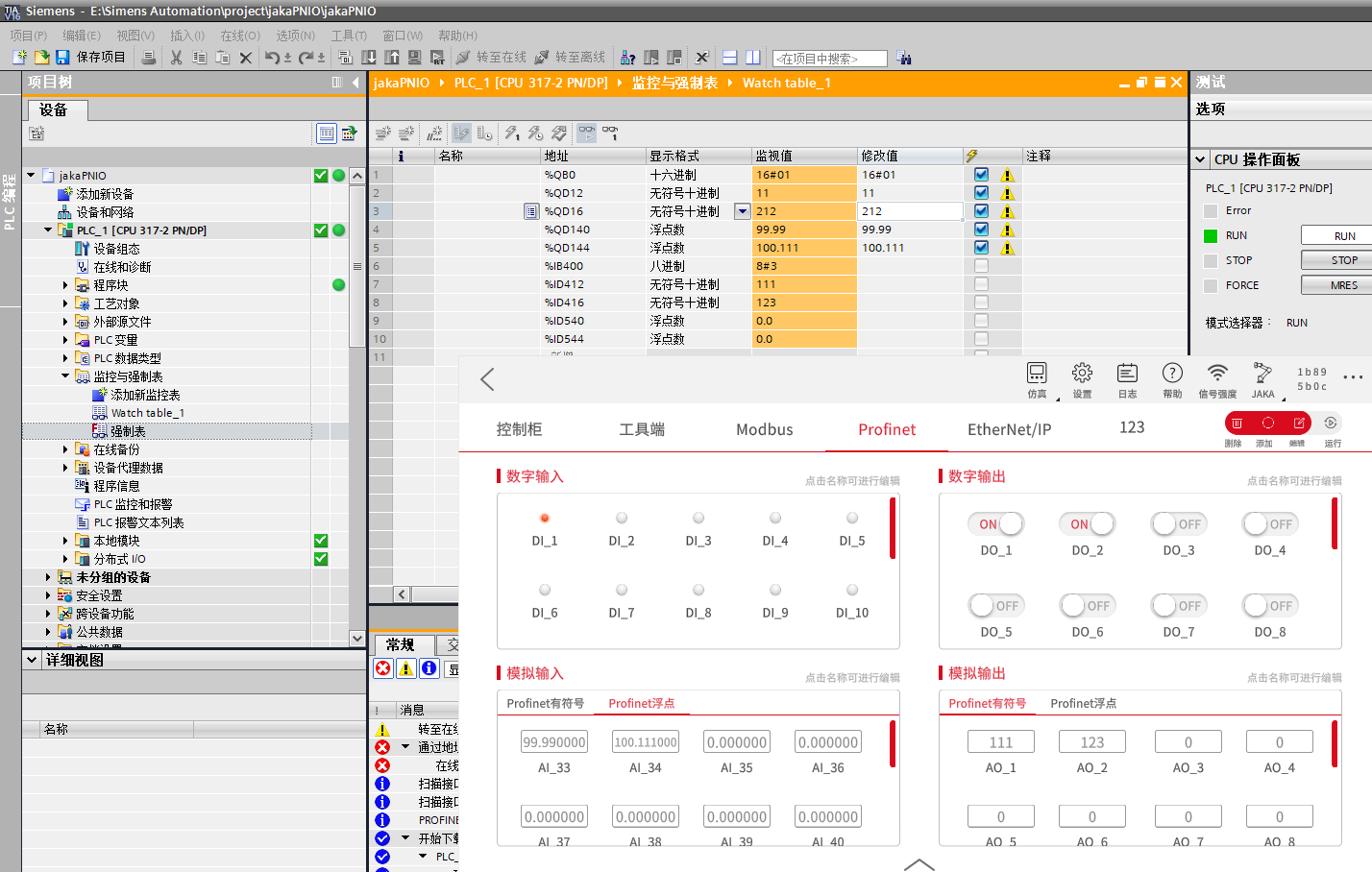
- 在左边菜单栏监控和强制列表下,新建监控表,根据Profinet IO地址分配表,对DI、AI、DO和AO对应的地址进行操作,即可实现控制器和PLC之间的数据传输。
# Modbus TCP
# 主站
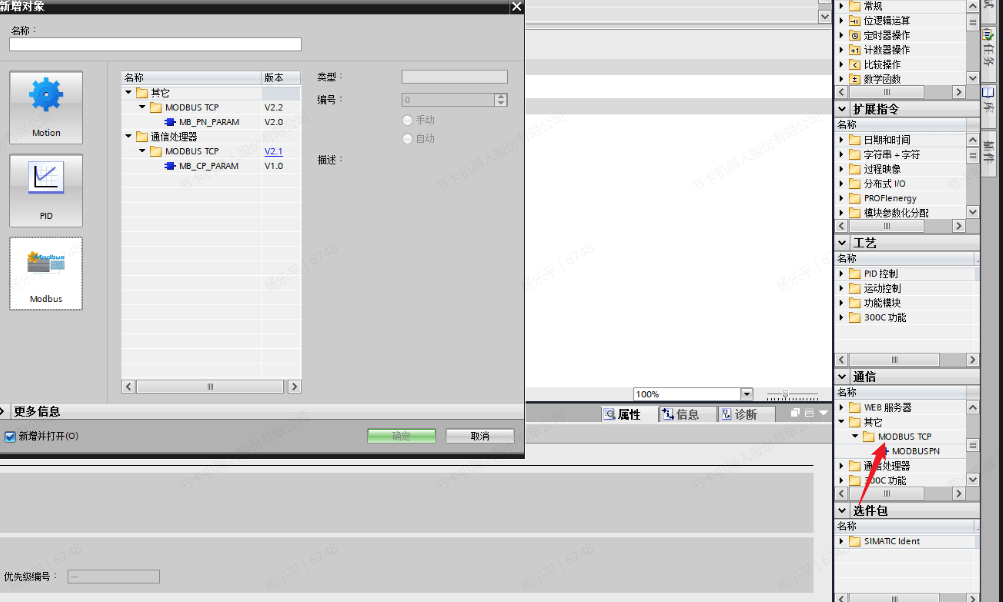
西门子同样通过编程实现Modbus TCP协议,S7-300可以使用MODBUSPN模块
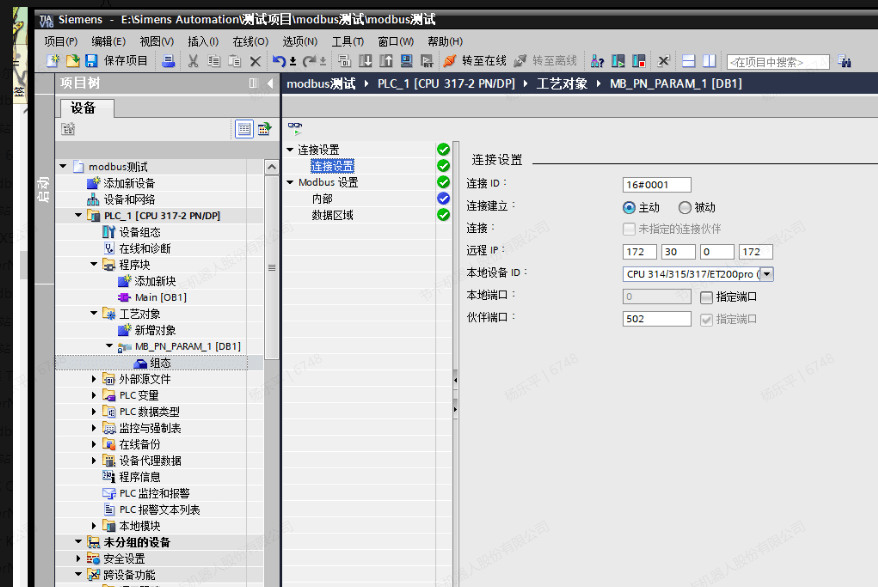
- 在工艺对象内插入MB_PN_PARAM
- 进入组态进行连接设置,设定IP地址、端口号等参数
- 设置Modbus的数据区域
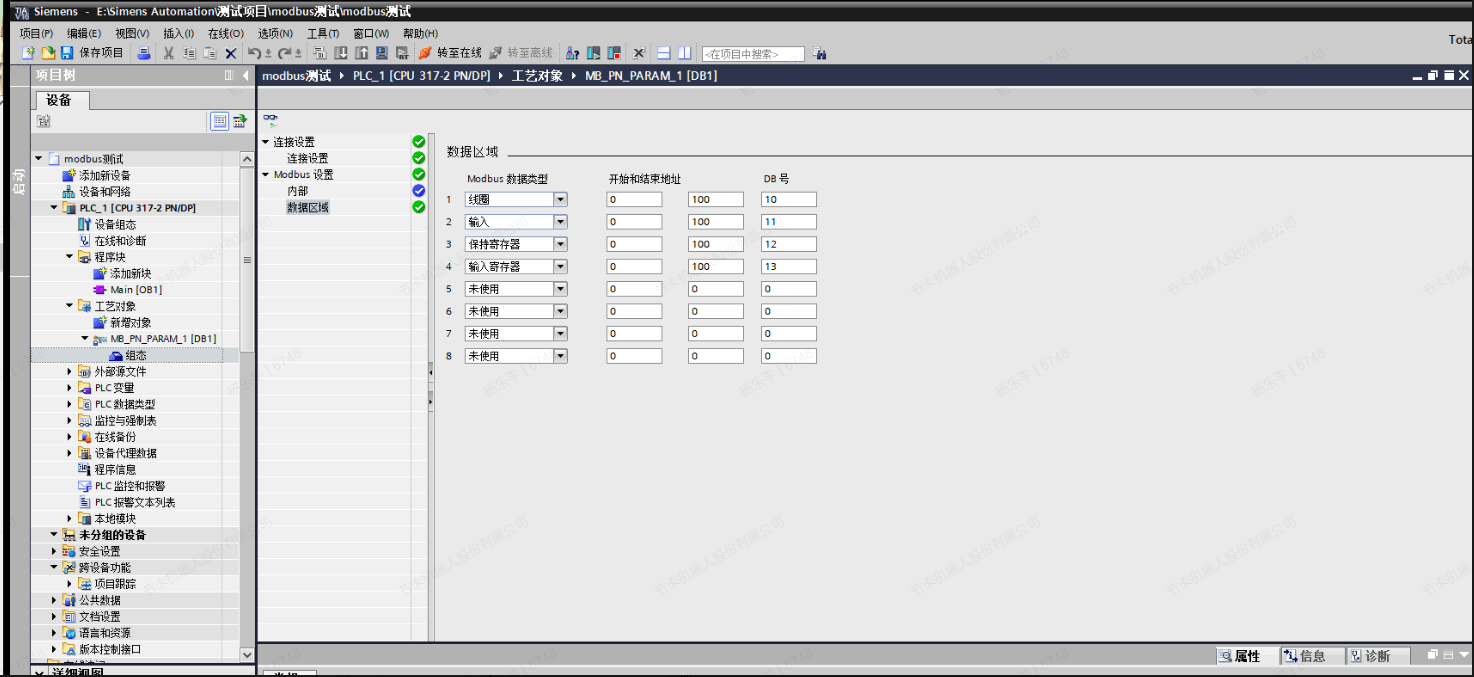
根据工艺对象的数据区域,添加4个区域块
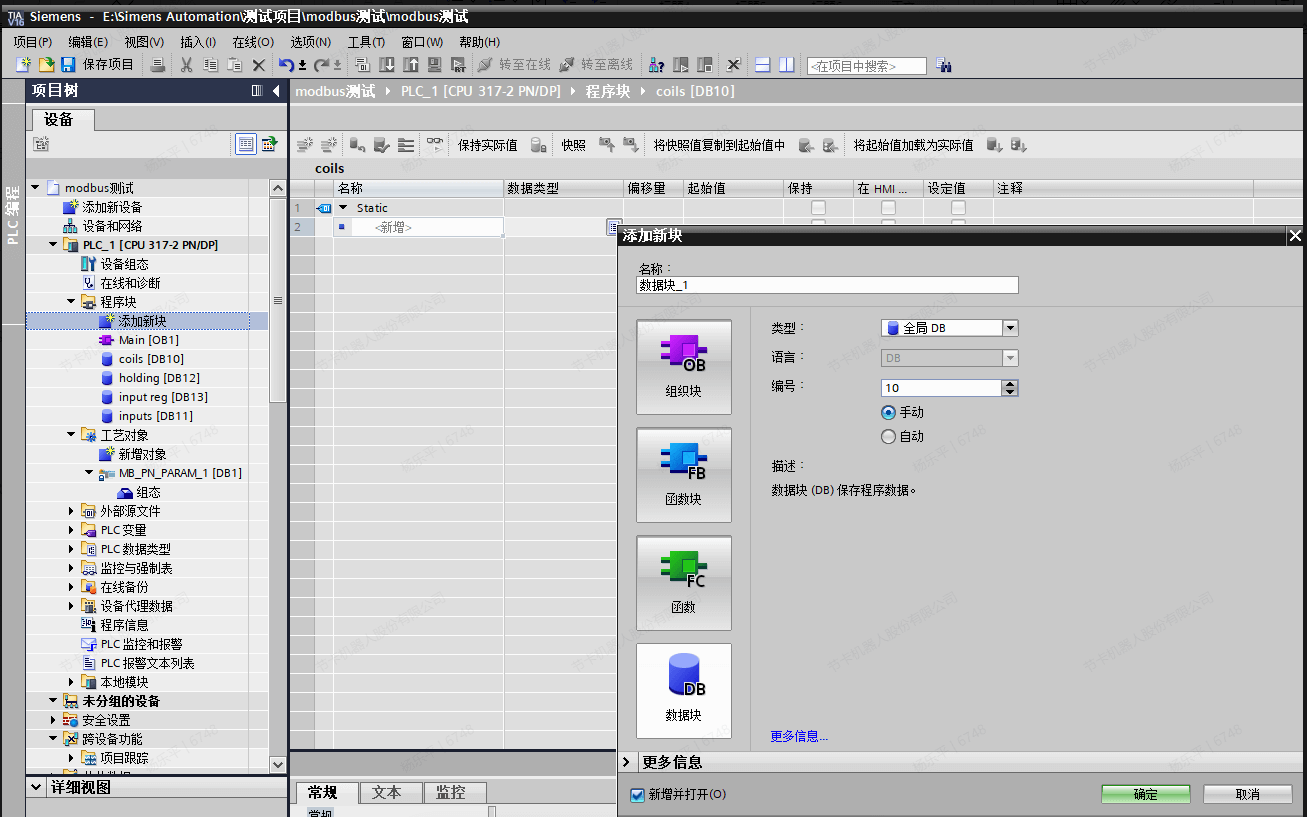
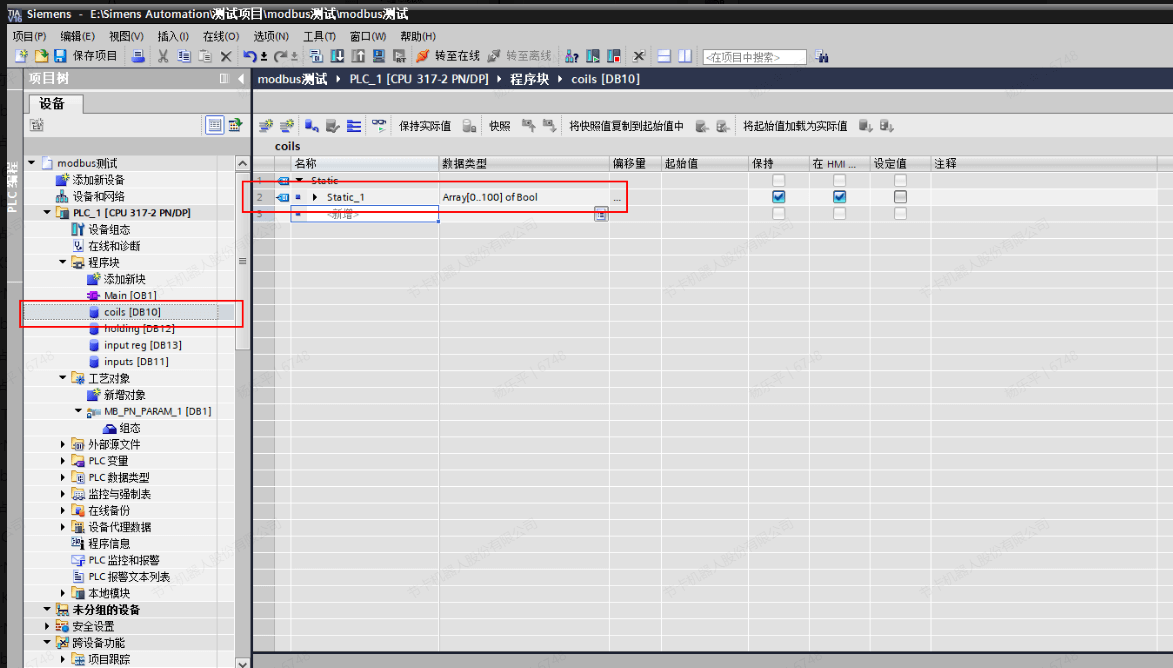
创建数据块
- 调用通信指令,设置对应参数

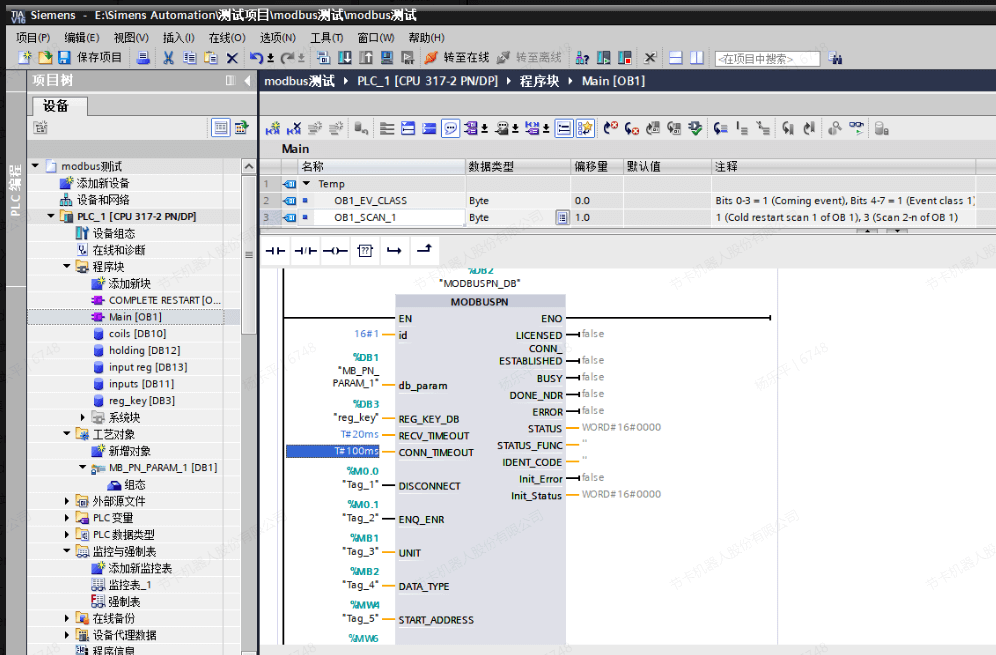
后续操作与罗克韦尔类似,在指令中对参数进行更改,可以与Modbus TCP通信,但此功能需要西门子的授权密钥
# 三菱 FX5U-80MT/DSS
所需软件:MELSOFT GX Works3,EtherNet/IP Configuration Tool for FX5-ENET/IP,JAKA Zu APP
# EtherNet/IP
FX5U默认ip为192.168.3.250;FX5 ENET/IP默认IP为192.168.3.251
需要使用扩展模块FX5-ENT/IP开启EtherNet/IP功能,此功能需要软件EtherNet/IP Configuration Tool for FX5-ENET/IP,可在三菱官网或联系供应商获取
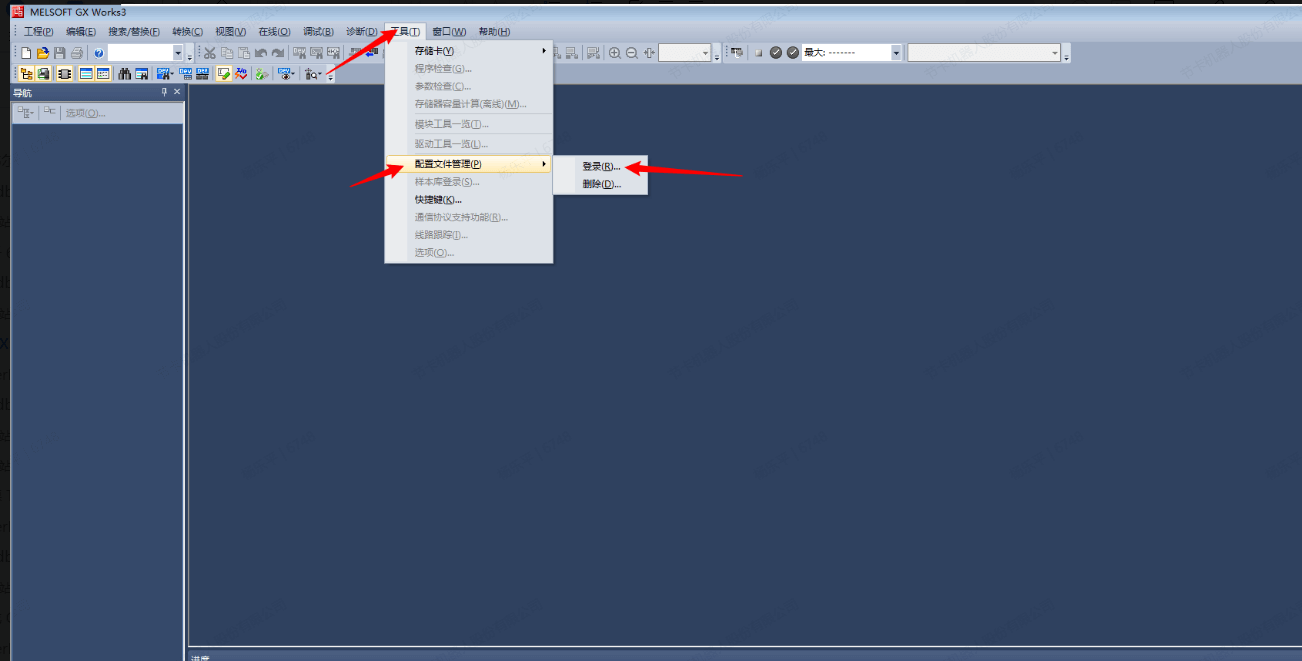
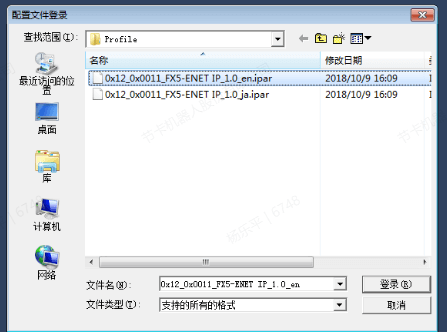
- 使用GX works3登录FX5-ENET/IP的配置文件
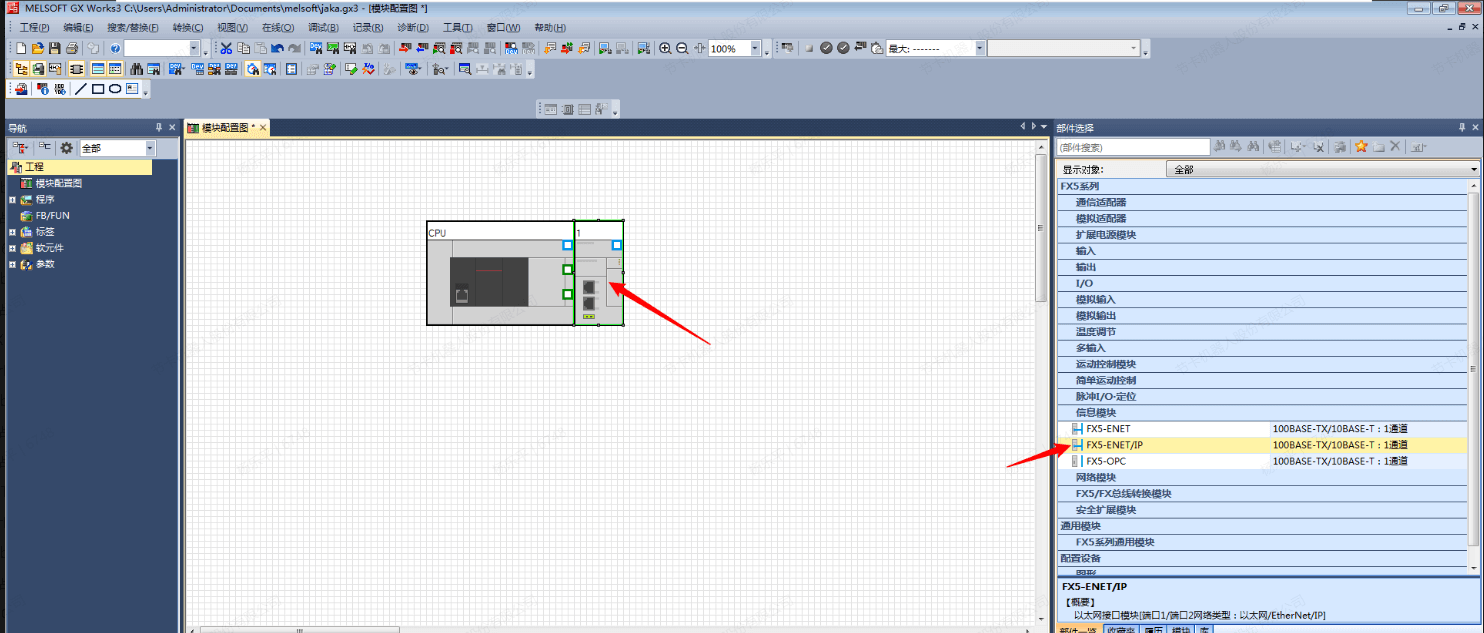
- 新建工程,选择对应型号的PLC

- 从信息模块中拖入FX5-ENET/IP,与FX5U完成拼接
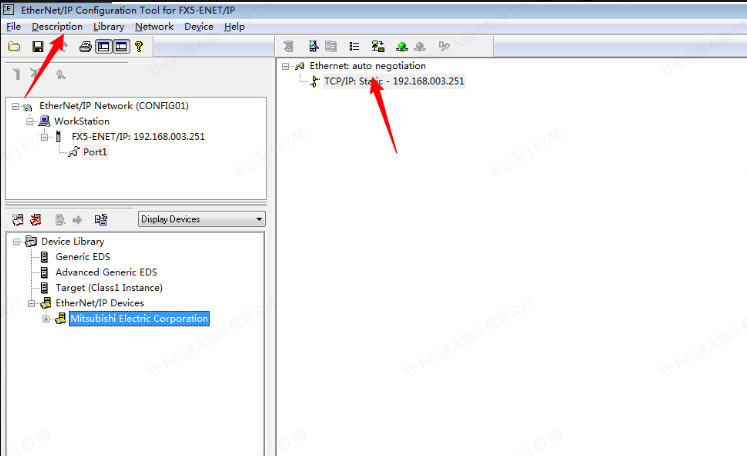
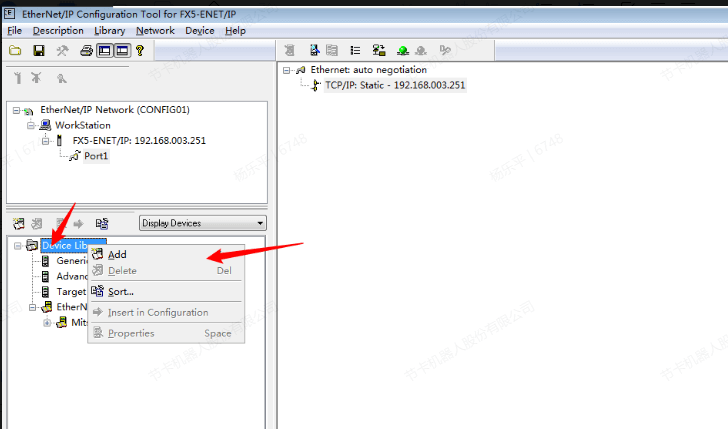
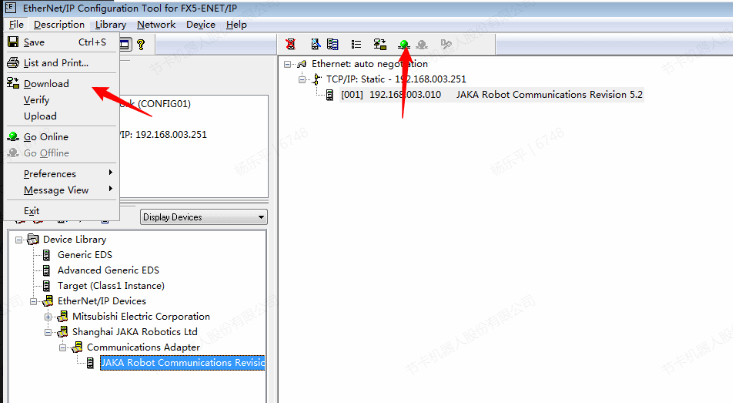
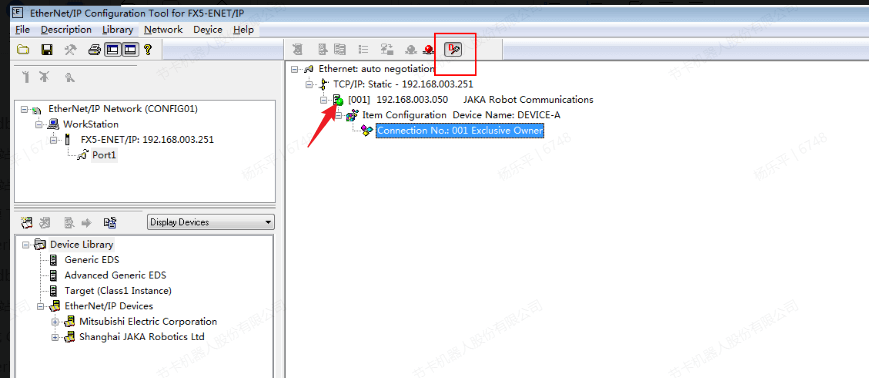
- 打开三菱EtherNet/IP Configuration Tool for FX5-ENET/IP工具,点击Description中add添加配置模块并更改地址,注意与模块的ip地址保持同一网段。
- 选择device library添加eds文件。
- 将eds文件直接拖至TCP/IP下方,注意配置其IP与模块同网段。
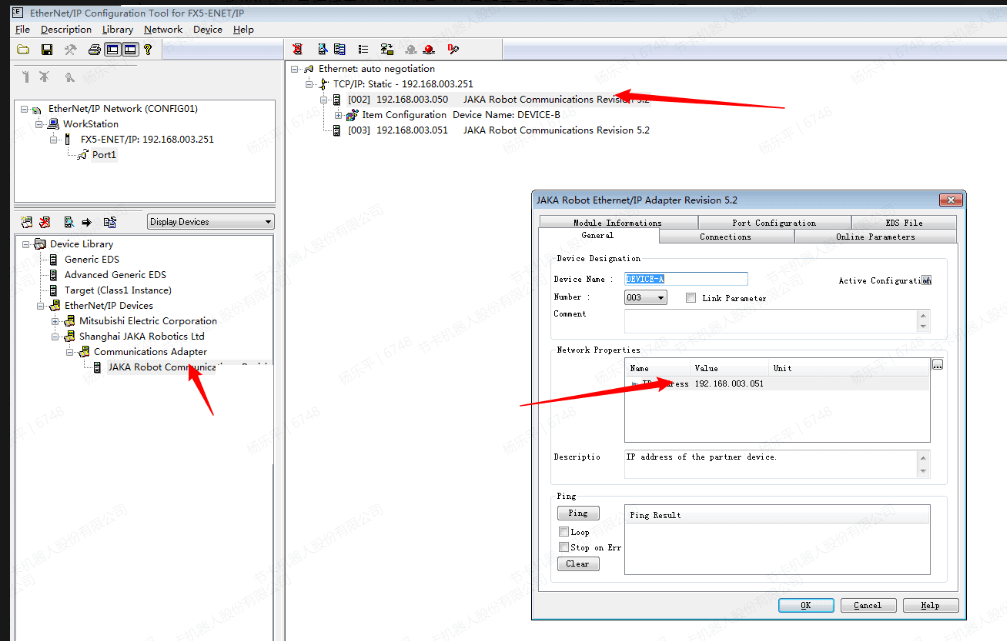
- 可以使用配置界面的ping功能测试是否成功连接。
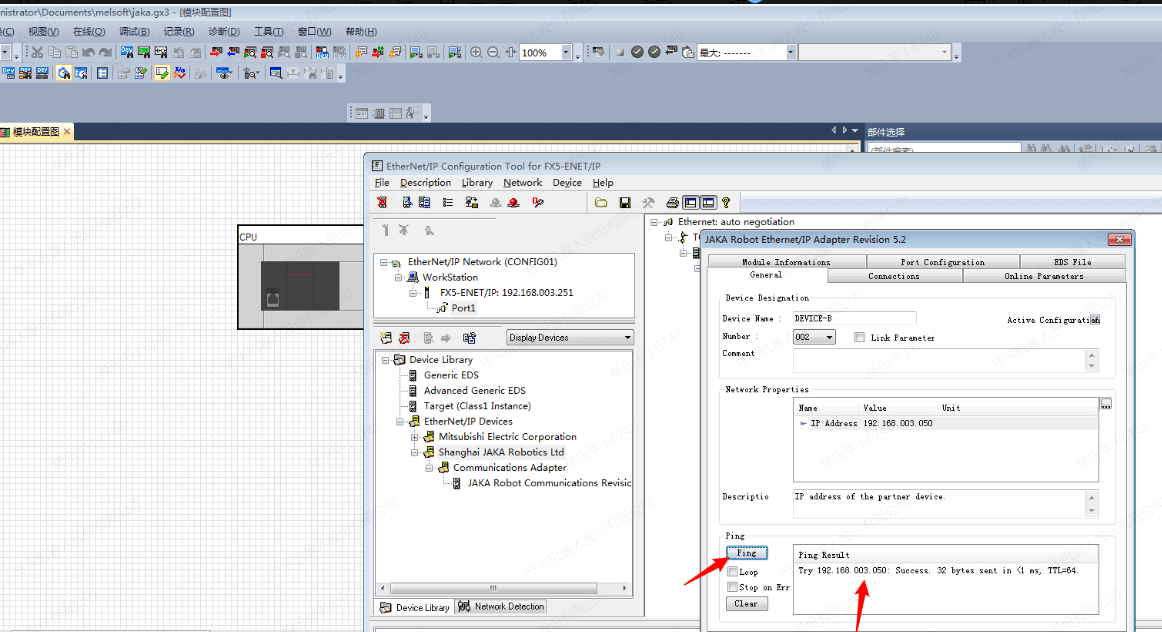
- 点击在线并将配置下载到模块
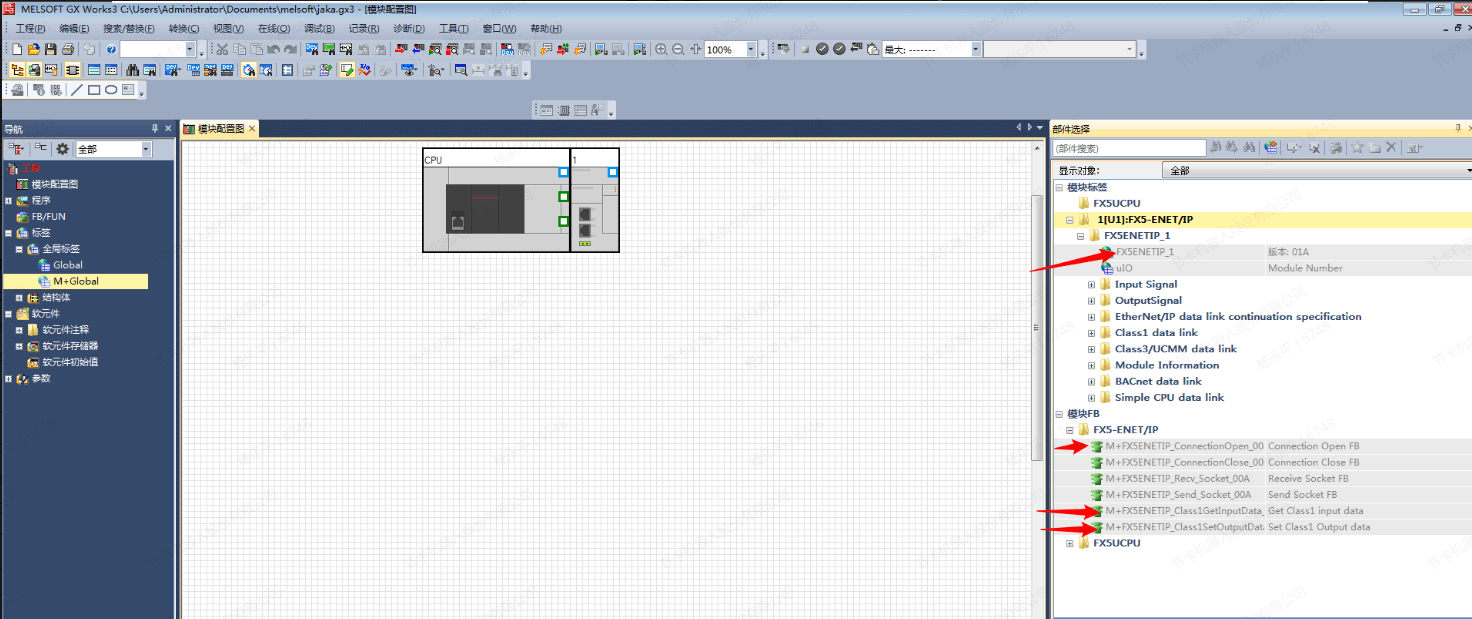
- 由于三菱模块需要通过程序运行,且需要功能块激活,因此配置下载完成后需要回到主界面编程触发EtherNet/IP功能,安装了FX5-ENET/IP的配置文件后,部件库出现了自带的标准功能块,选择添加模块标签
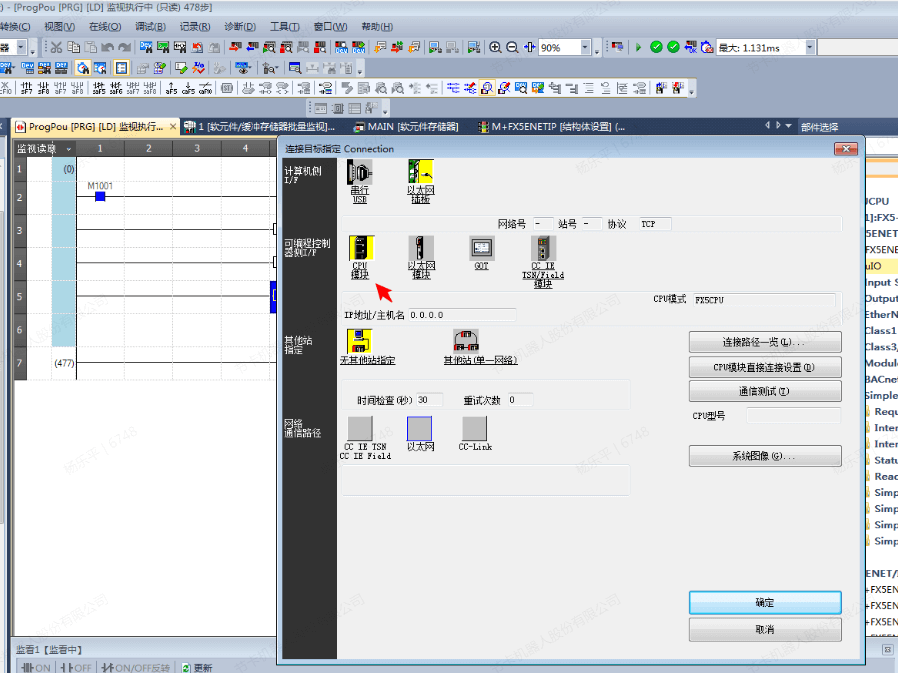
- 点击在线-当前连接目标进入连接界面
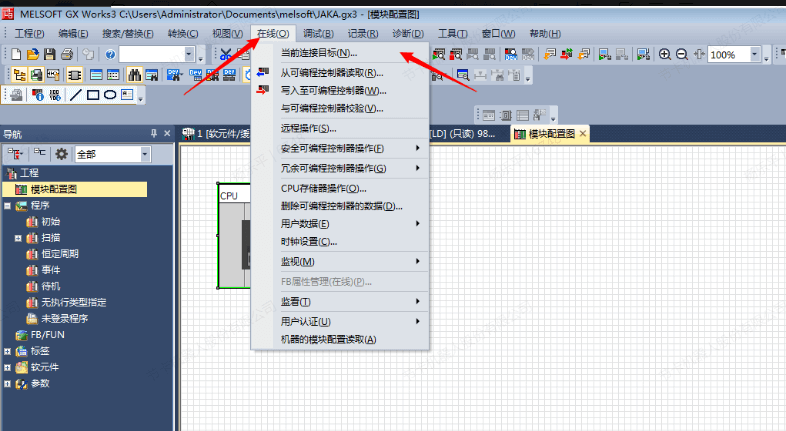
- 点击其他连接方法,打开连接目标指定画面
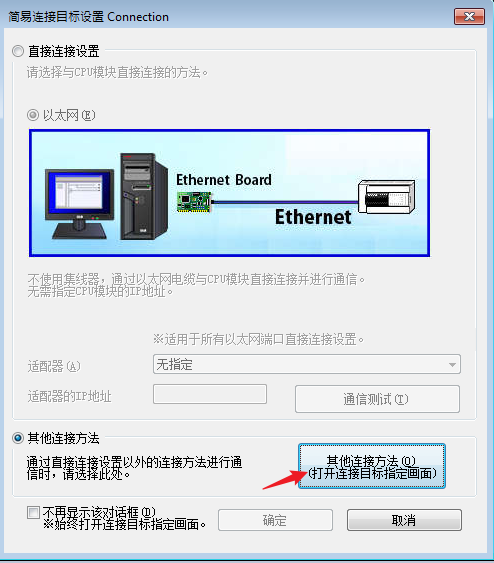
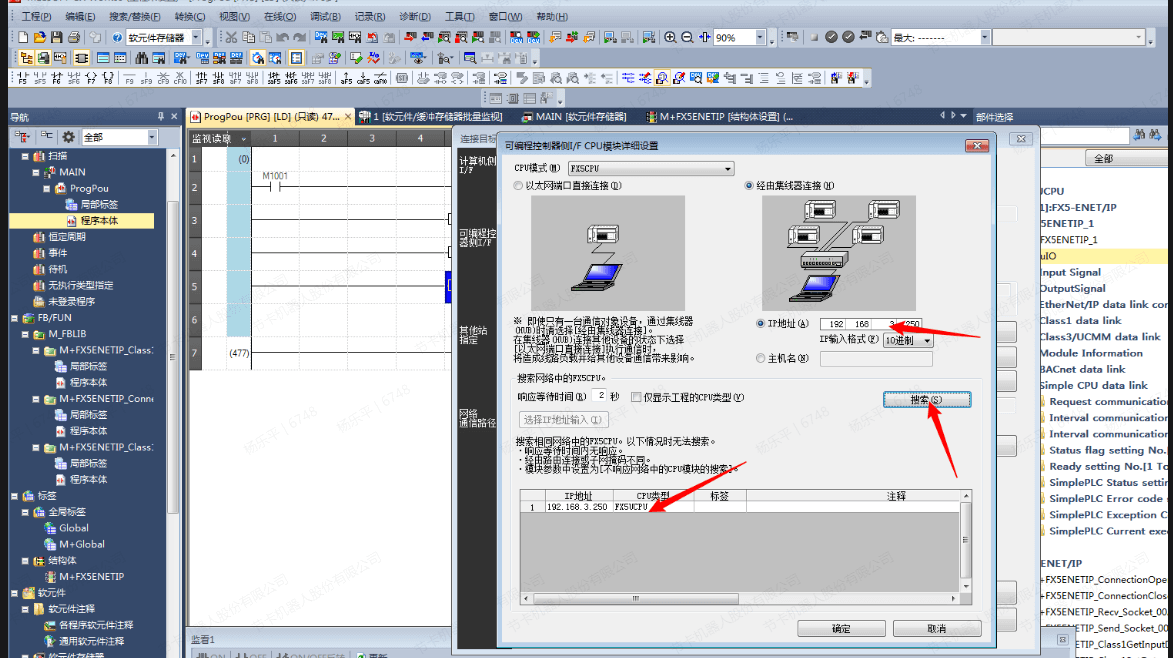
- 双击设备网络进行FX5U的IP设置
- 点击搜索,双击搜索出的设备并点击确认
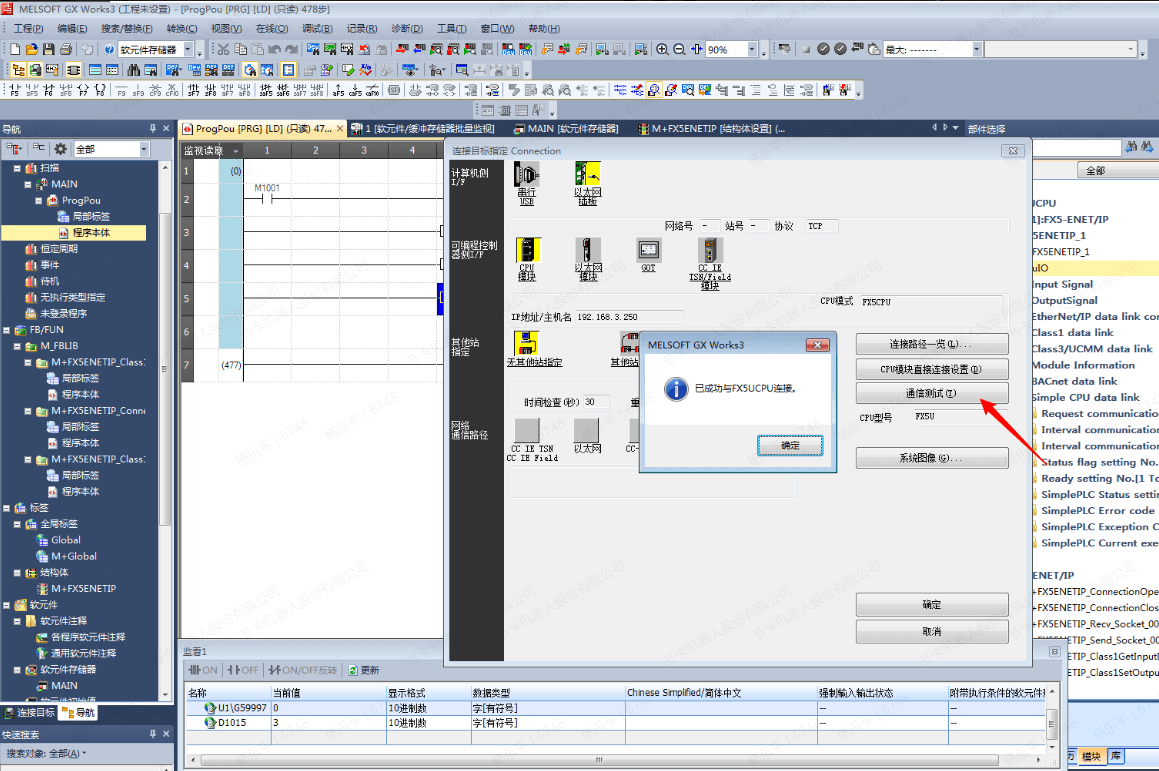
- 点击通信测试,此时应显示已成功连接
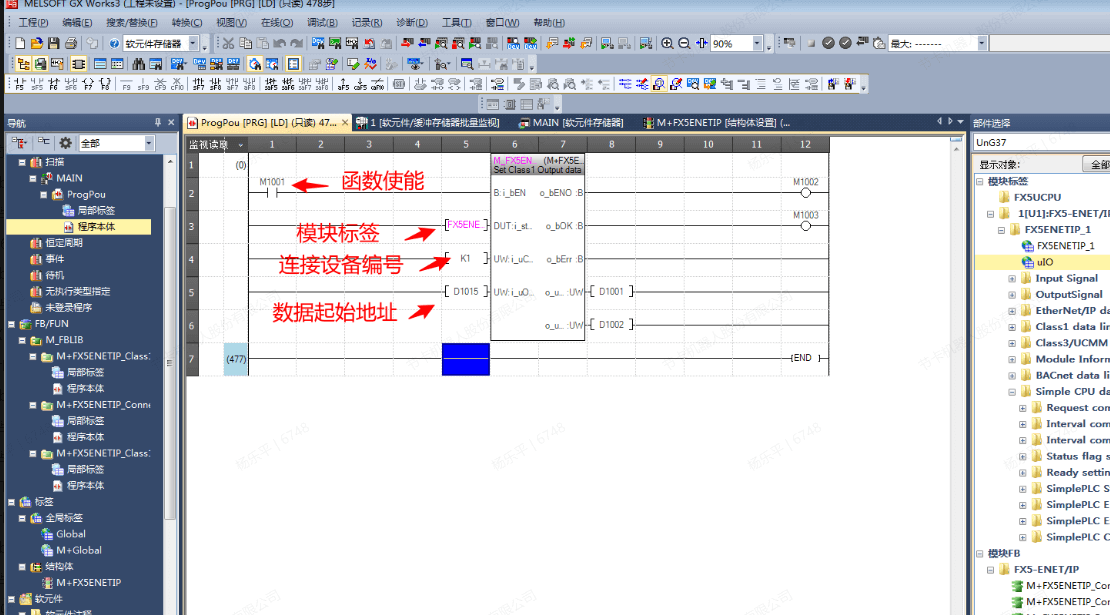
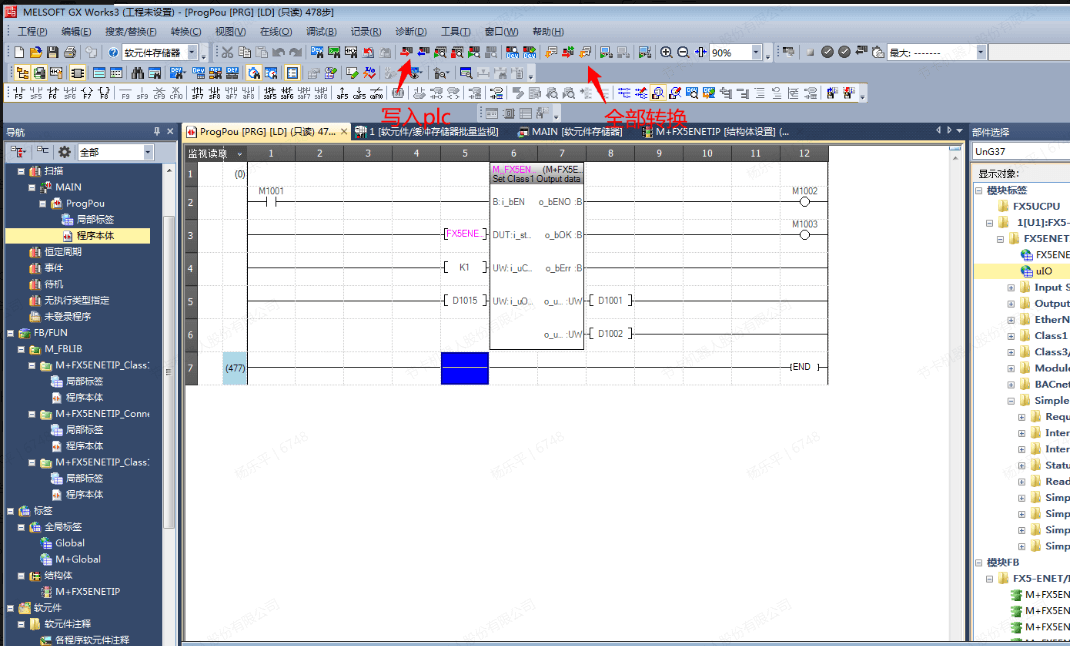
- 添加M+FX5ENETIP_Class1SetOutputdata_01A模块测试发送数据功能,编写测试程序如下
- 此时EtherNet/IP Configuration Tool for FX5-ENET/IP已配置完成,点击全部转换并写入FX5U
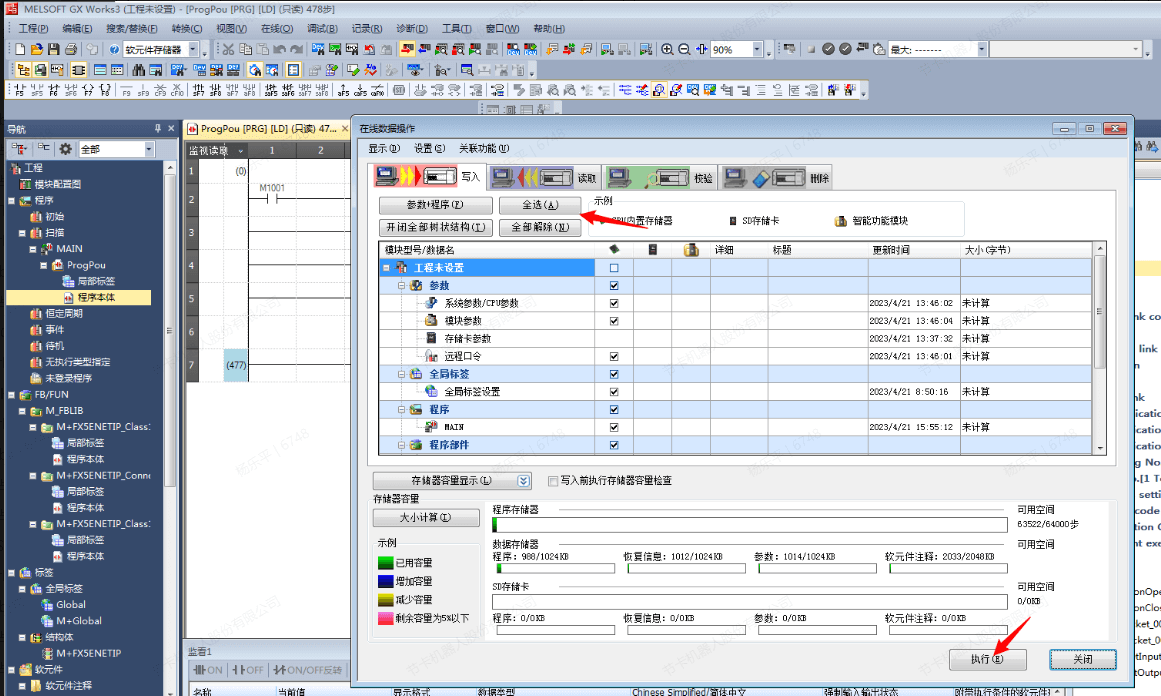
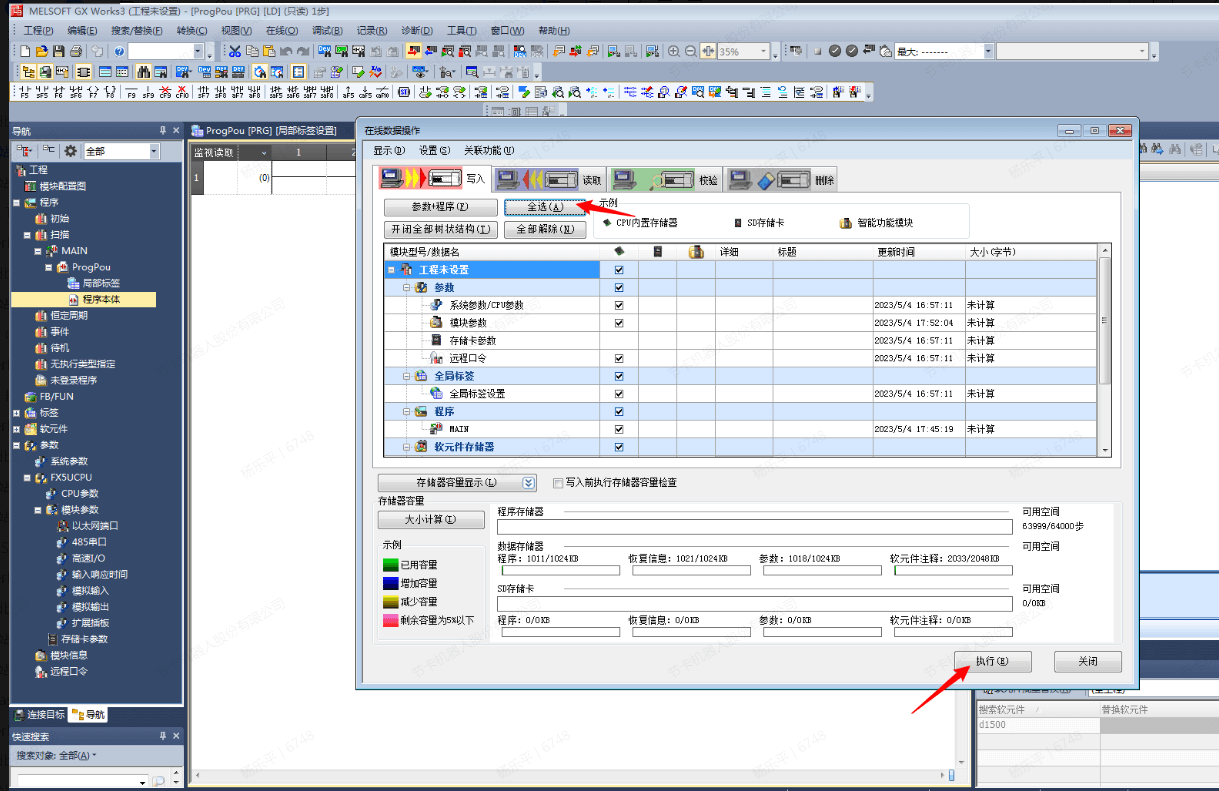
- 全选并执行写入,然后重置PLC,可以通过断电的方式实现,注意此时网线应接入FX5U单元。
- 重启后将网线从FX5U拔下并接入FX5-ENET/IP,同样进入在线-当前连接目标确认与EIP模块的通信正常,然后打开监视
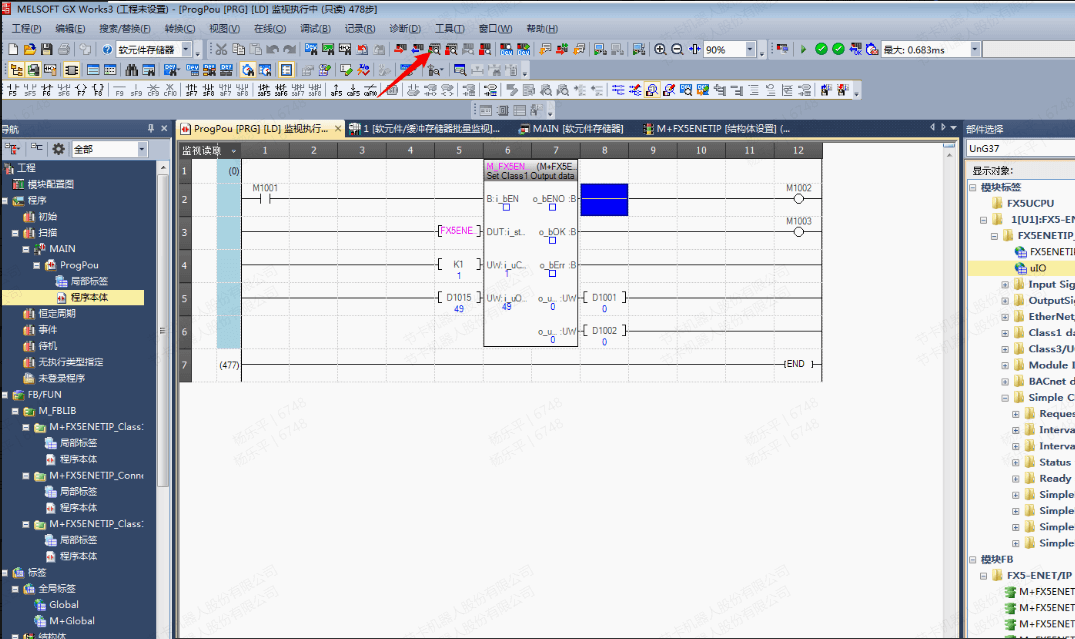
- 光标放在M1001开关,使用Shift+Enter改变输入信号触发此函数功能块
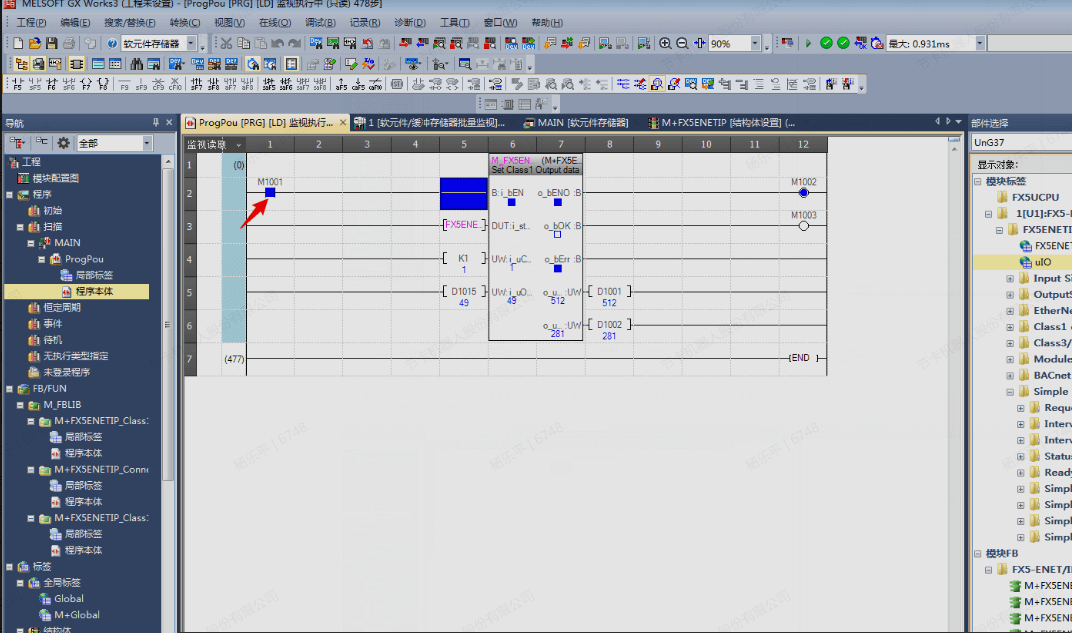
- 使用模块触发EIP功能后,此时APP侧应显示成功连接主站
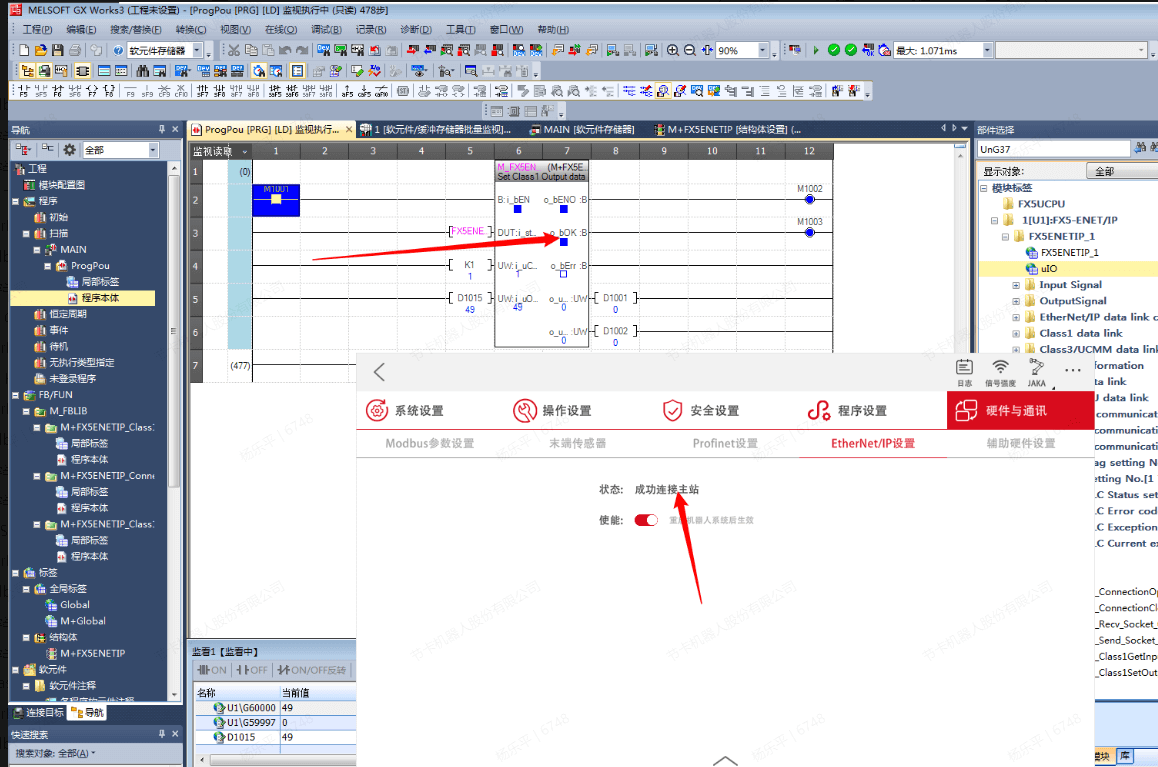
- 若在EtherNet/IP Configuration Tool for FX5-ENET/IP进行诊断,将显示设备正常在线
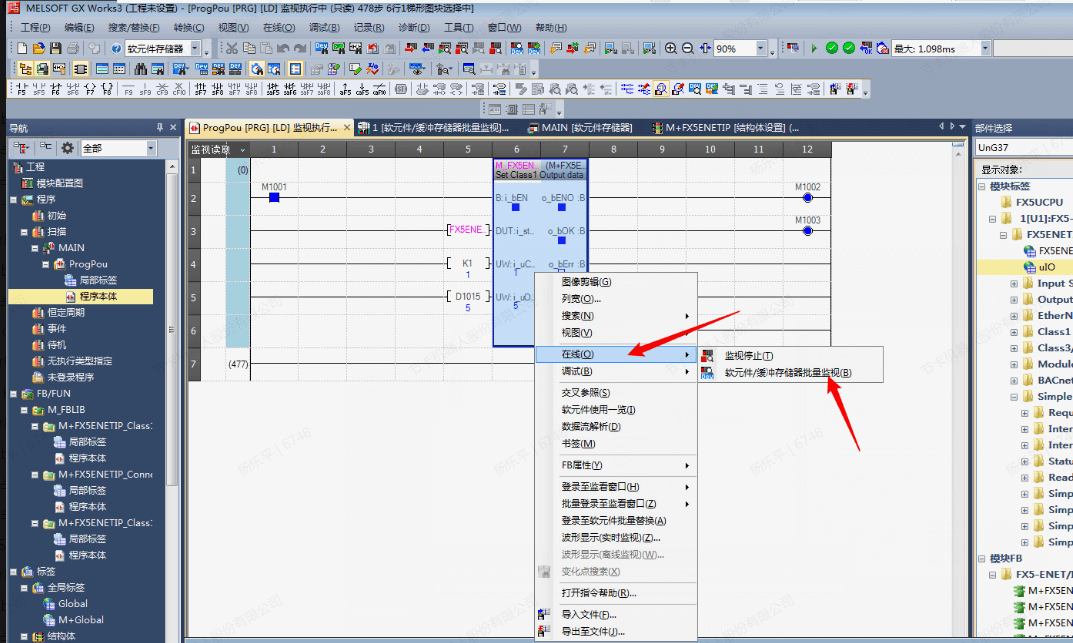
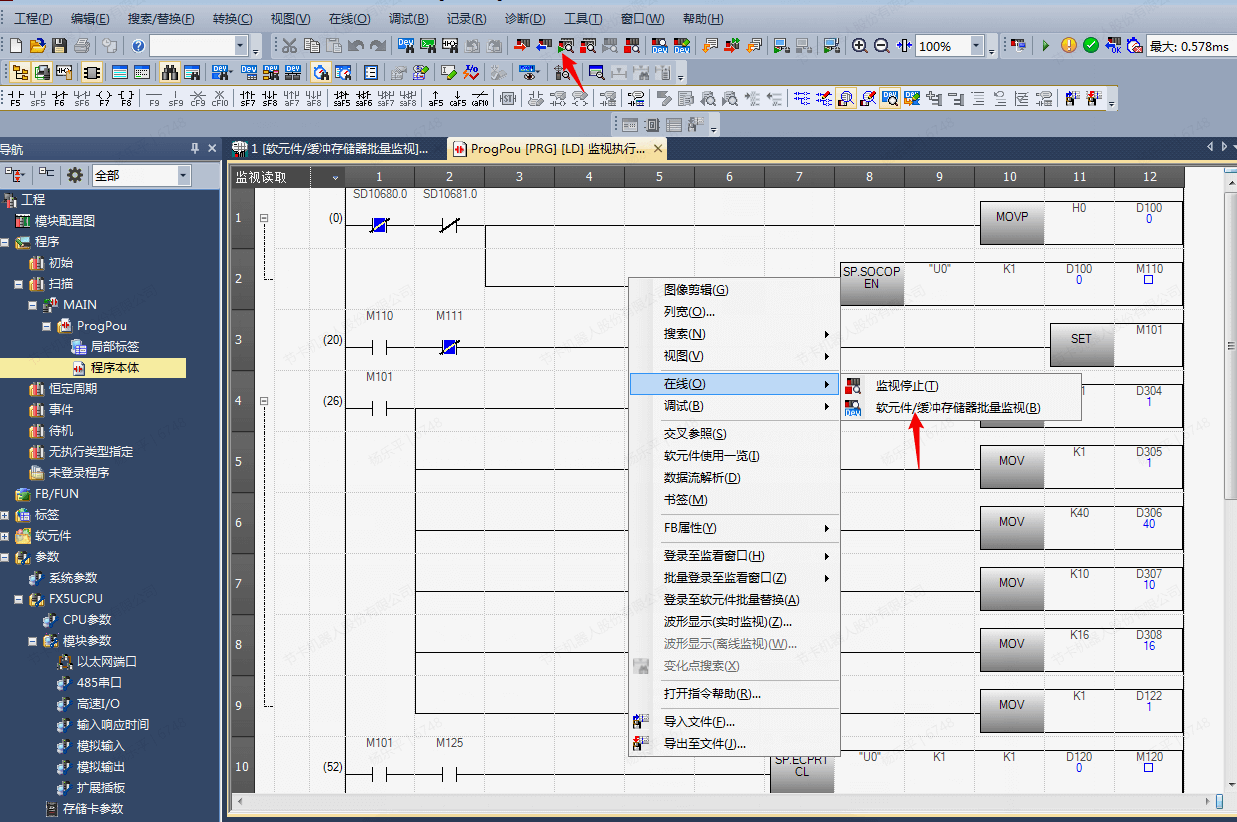
- 右键函数块,打开在线-软元件/缓冲存储器批量监视
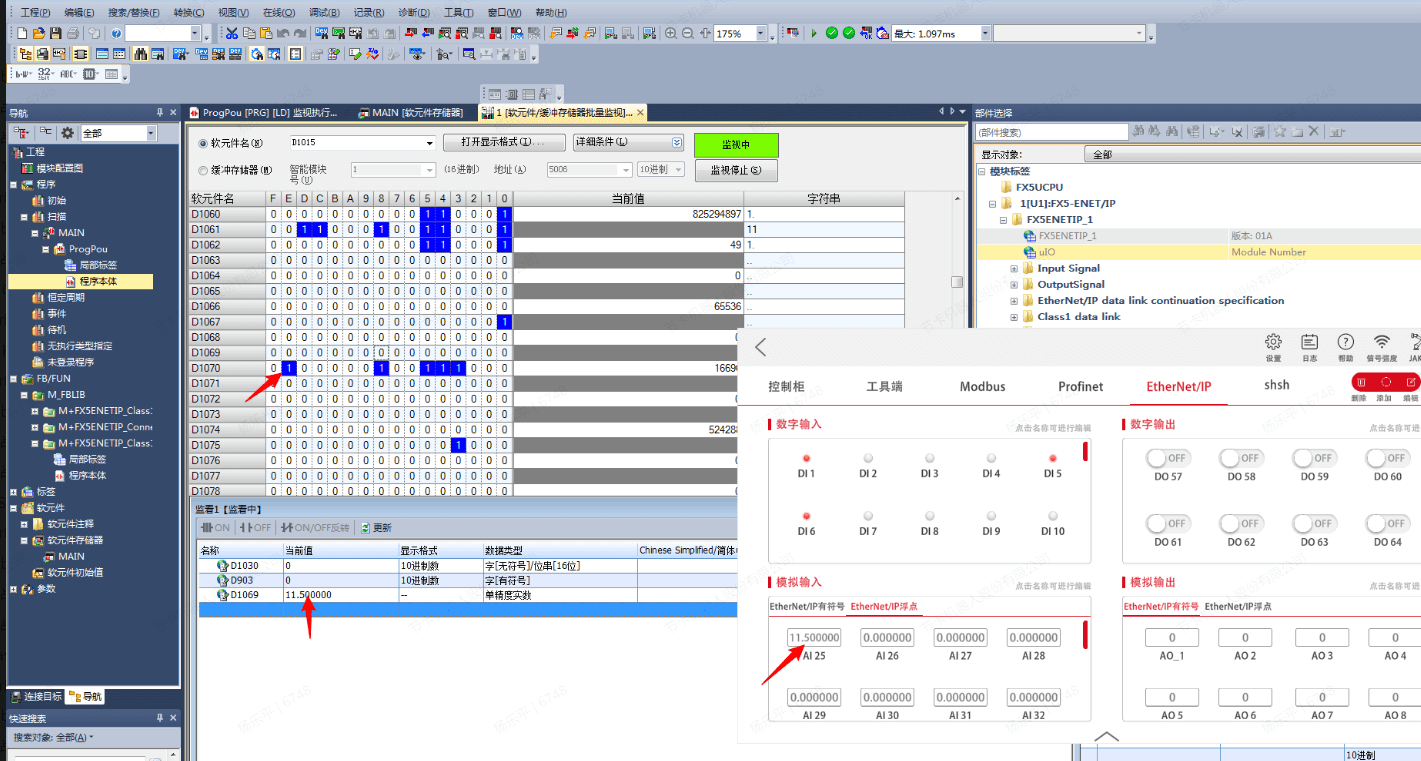
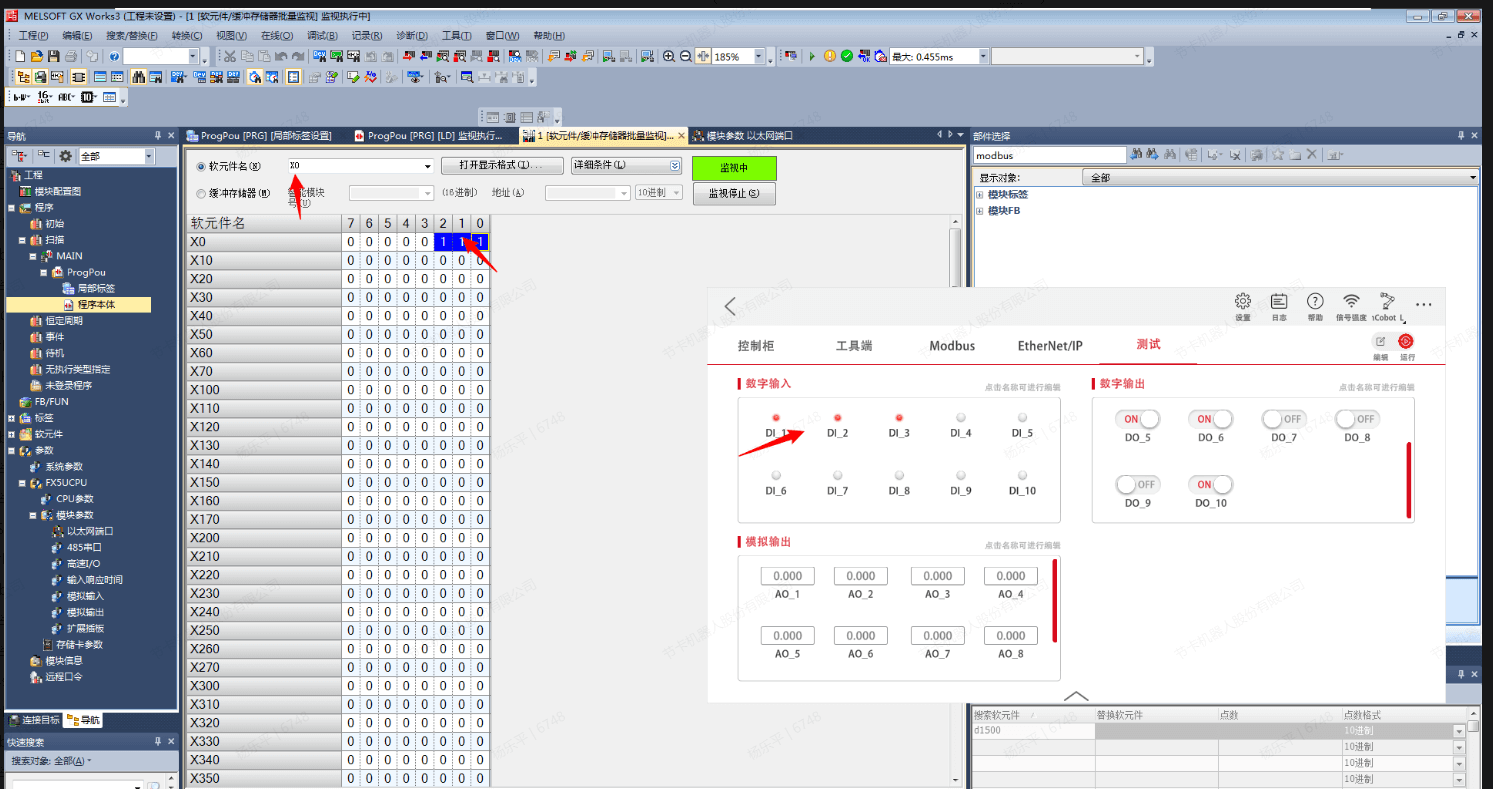
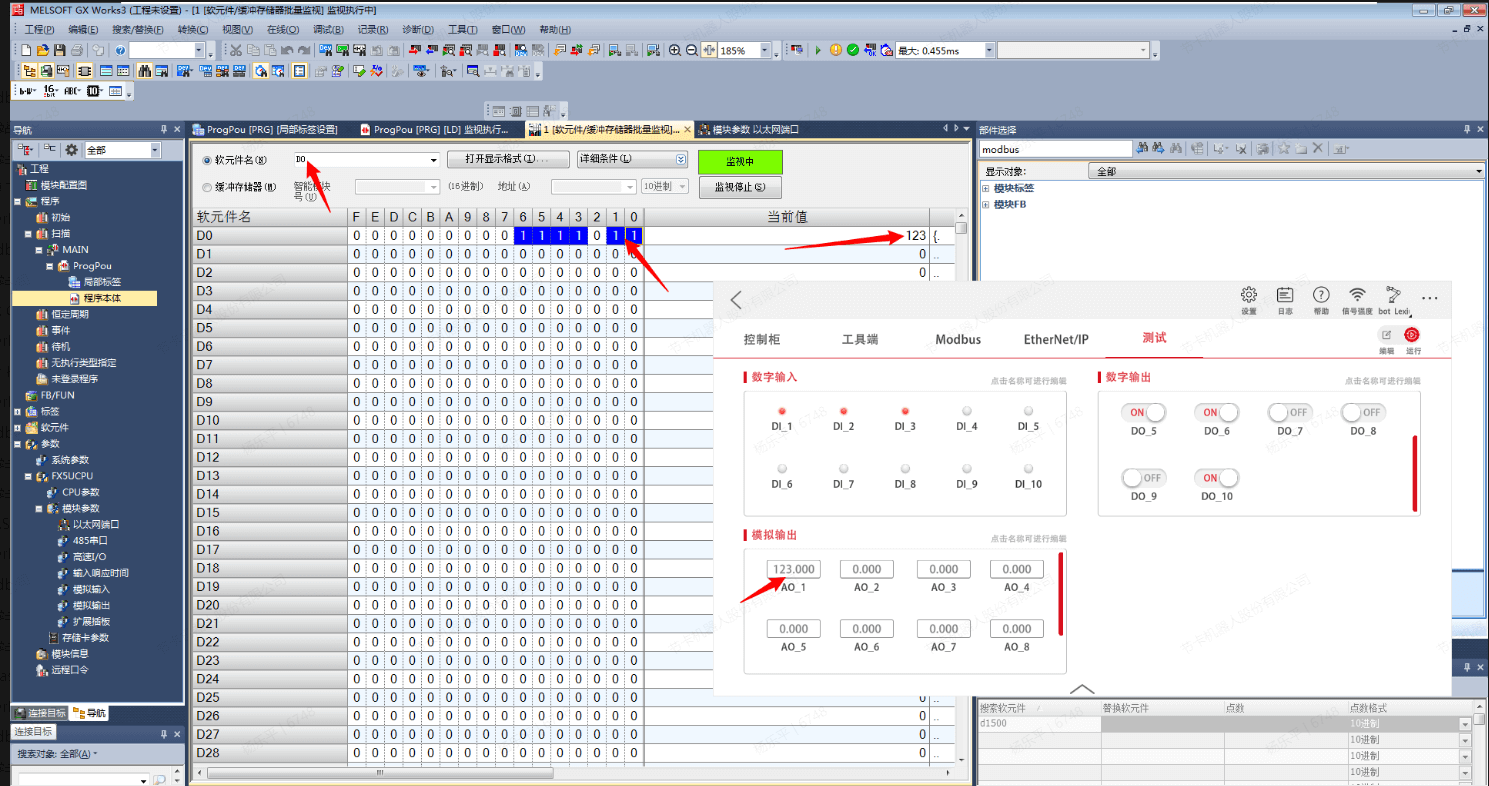
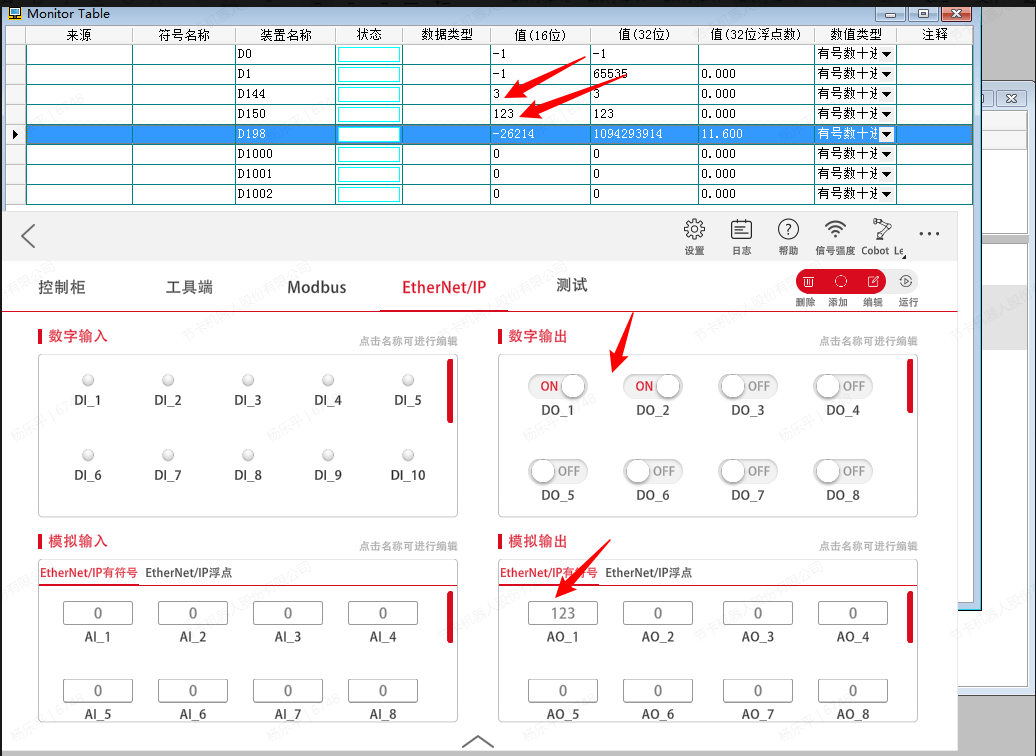
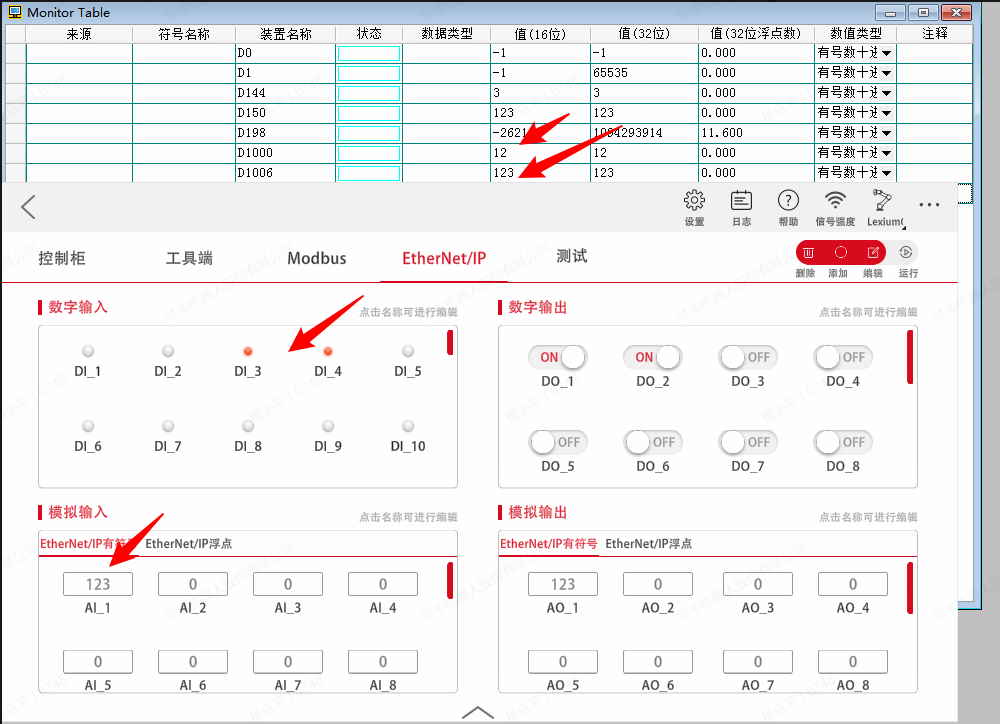
- 监视D1015并更新,此时数据应更新到DI和AI
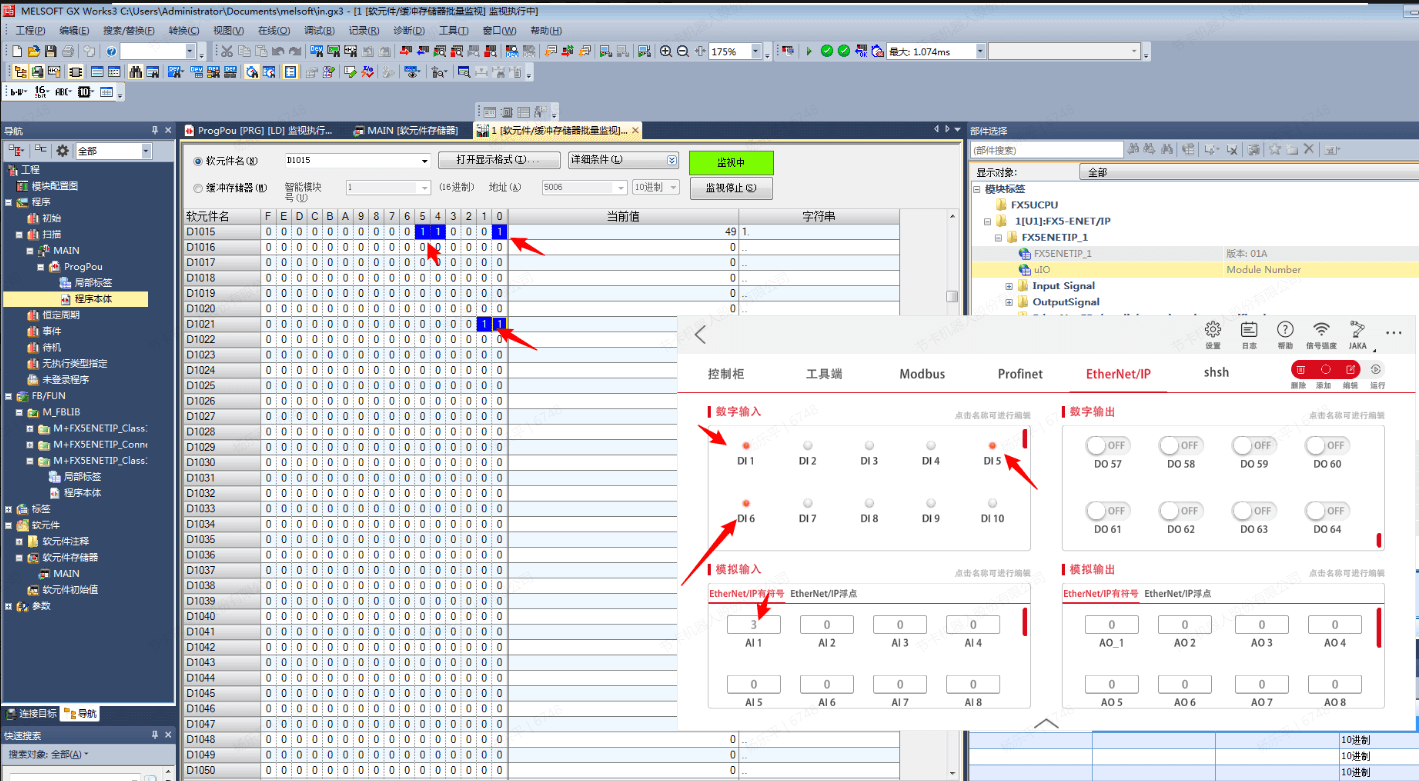
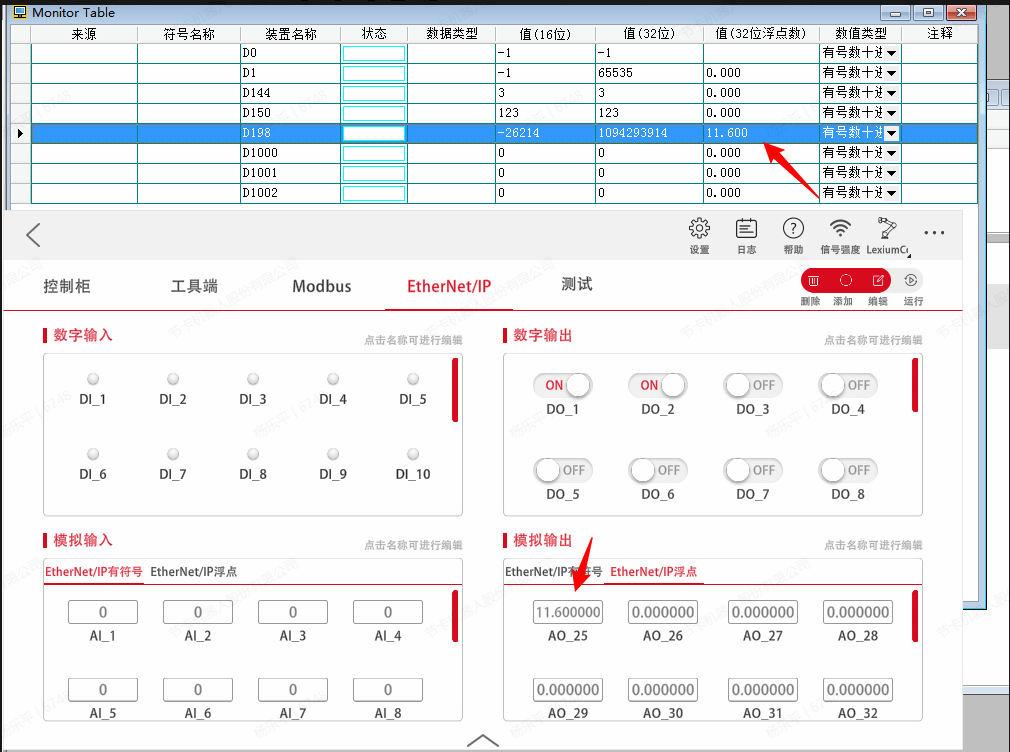
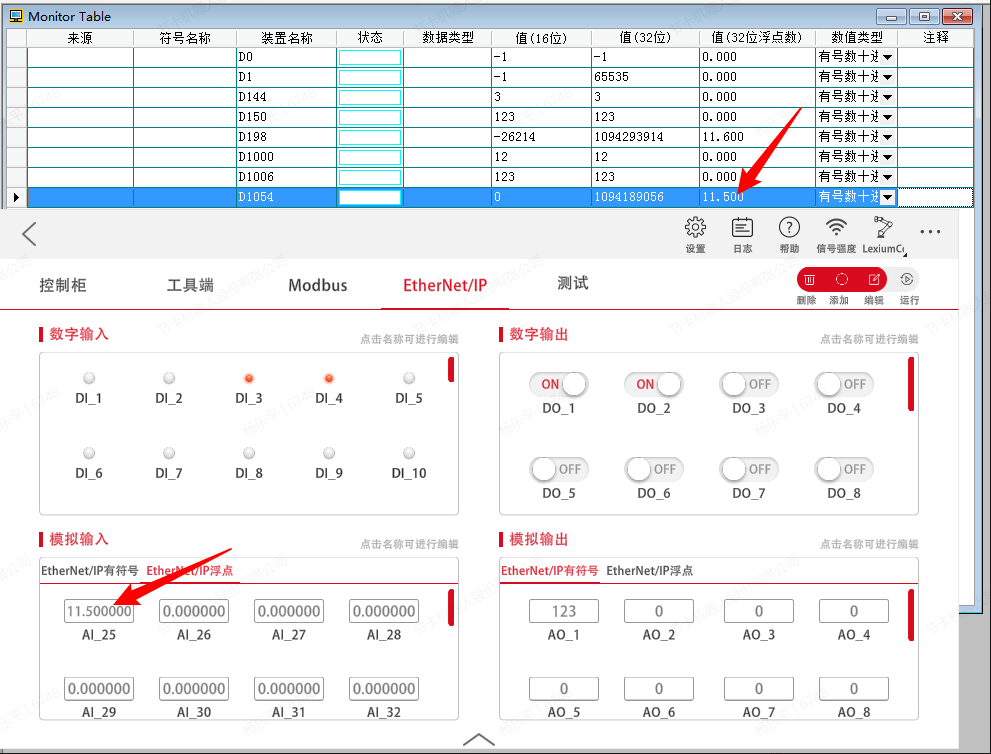
- 浮点数同理,可以通过监看窗口查看对应软元件的值,需要注意的是,软元件存储器以16位为单元存储数据,有符号整数和浮点数都需要高低位共同组成准确的32位数据
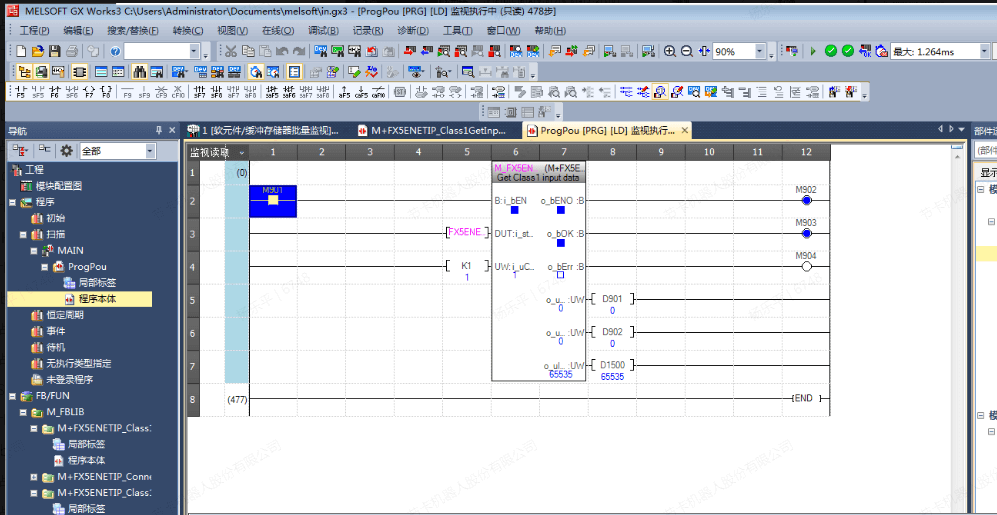
- 拖入M+FX5ENETIP_Class1Getinputdate_01A模块测试接收数据功能,编写测试程序如下,每次编译写入需要将网线插在CPU单元,即FX5U,而实际使用EIP功能时,需要将网线插回FX5-ENET/IP
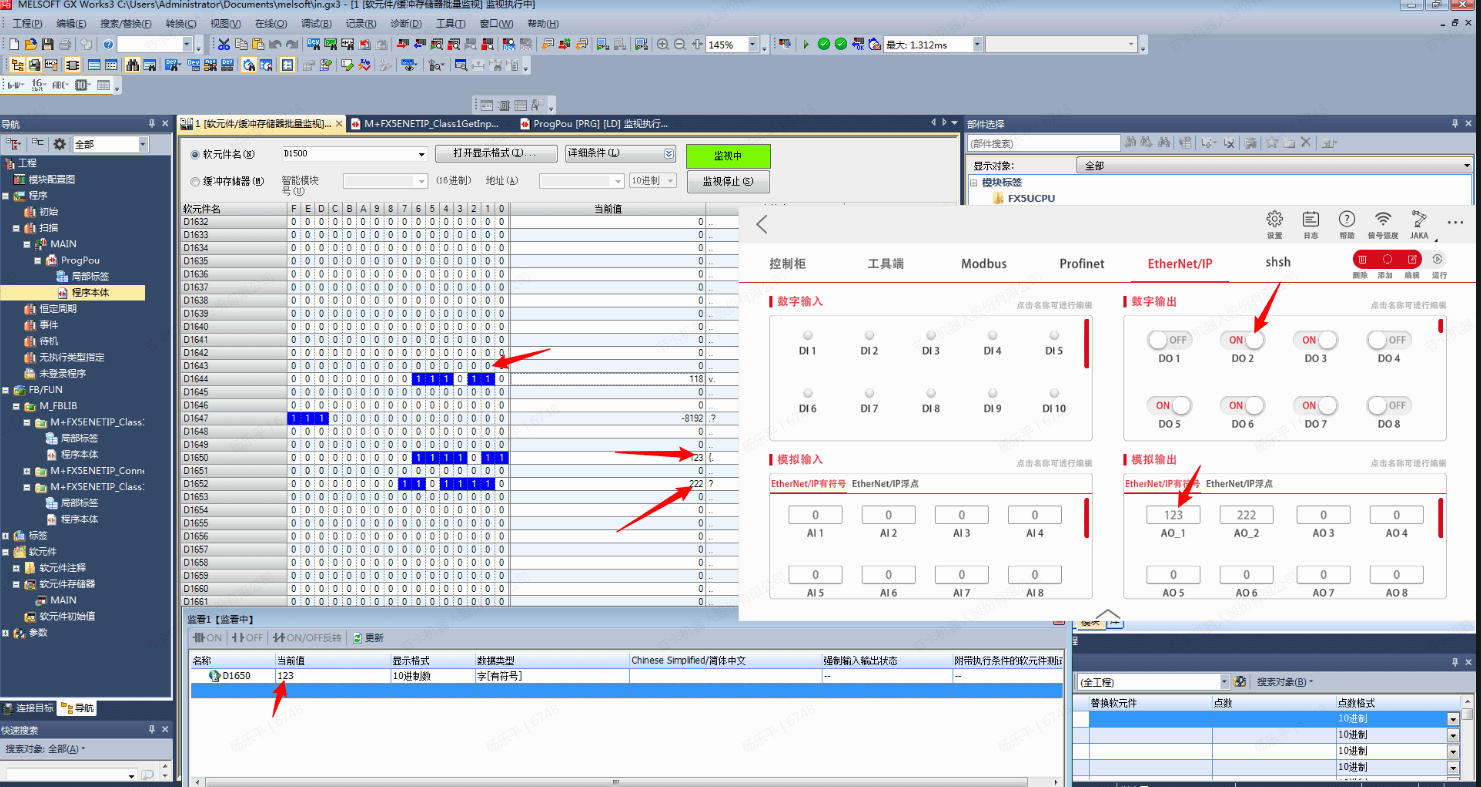
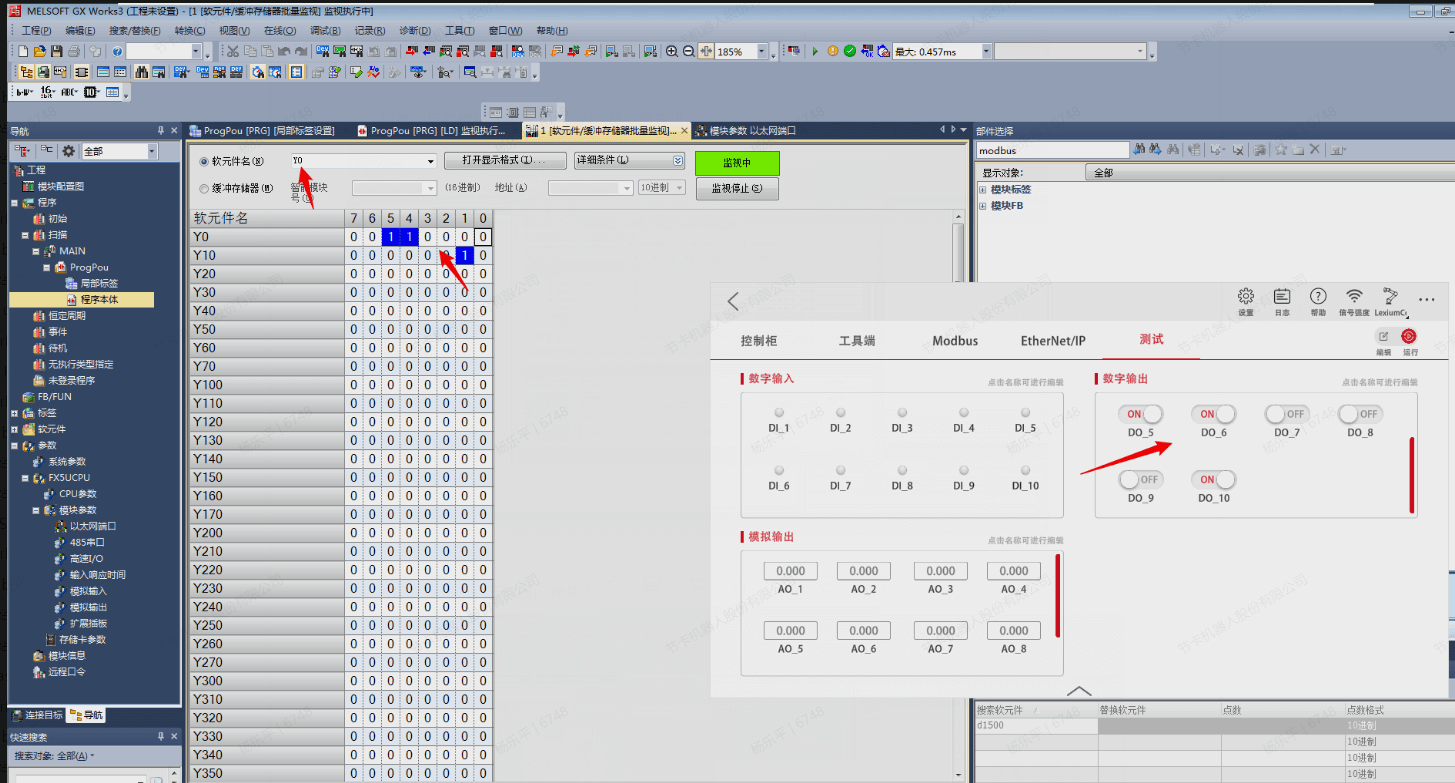
- 在APP修改DO和AO的值,观察值的更新
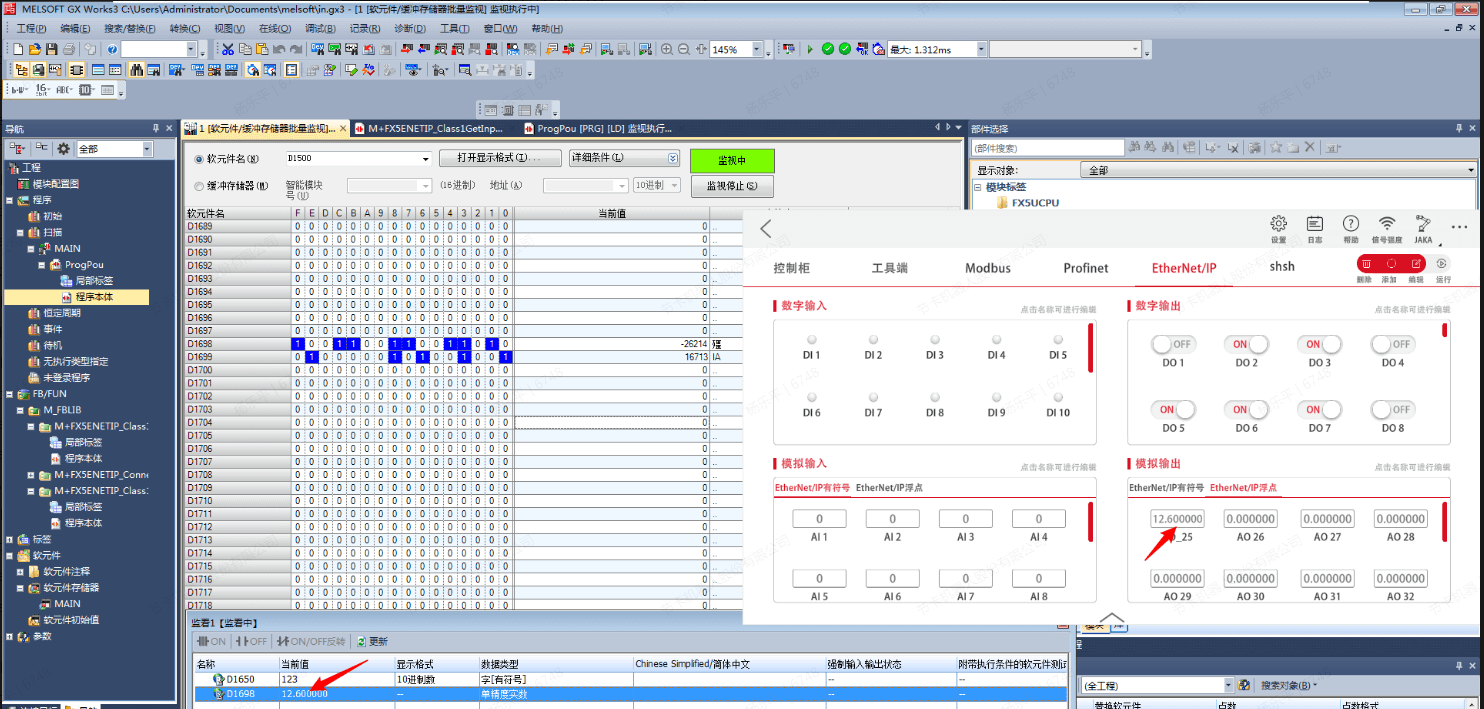
- 浮点数同理
# Modbus TCP
# 从站
- 打开以太网设置下的Modbus/TCP设置,双击对象设备连接配置设置
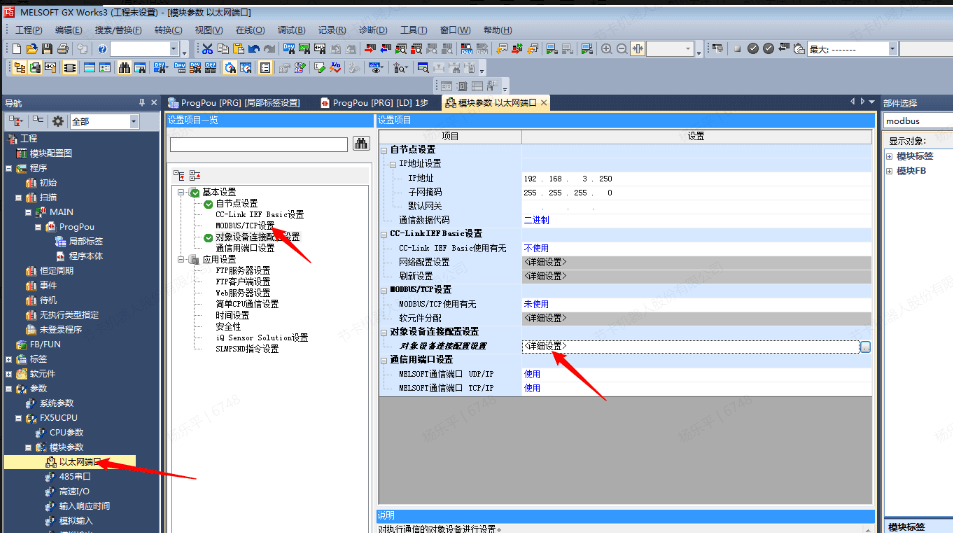
- 将Modbus/TCP连接设备拖入网络拓扑中,反映设置并关闭
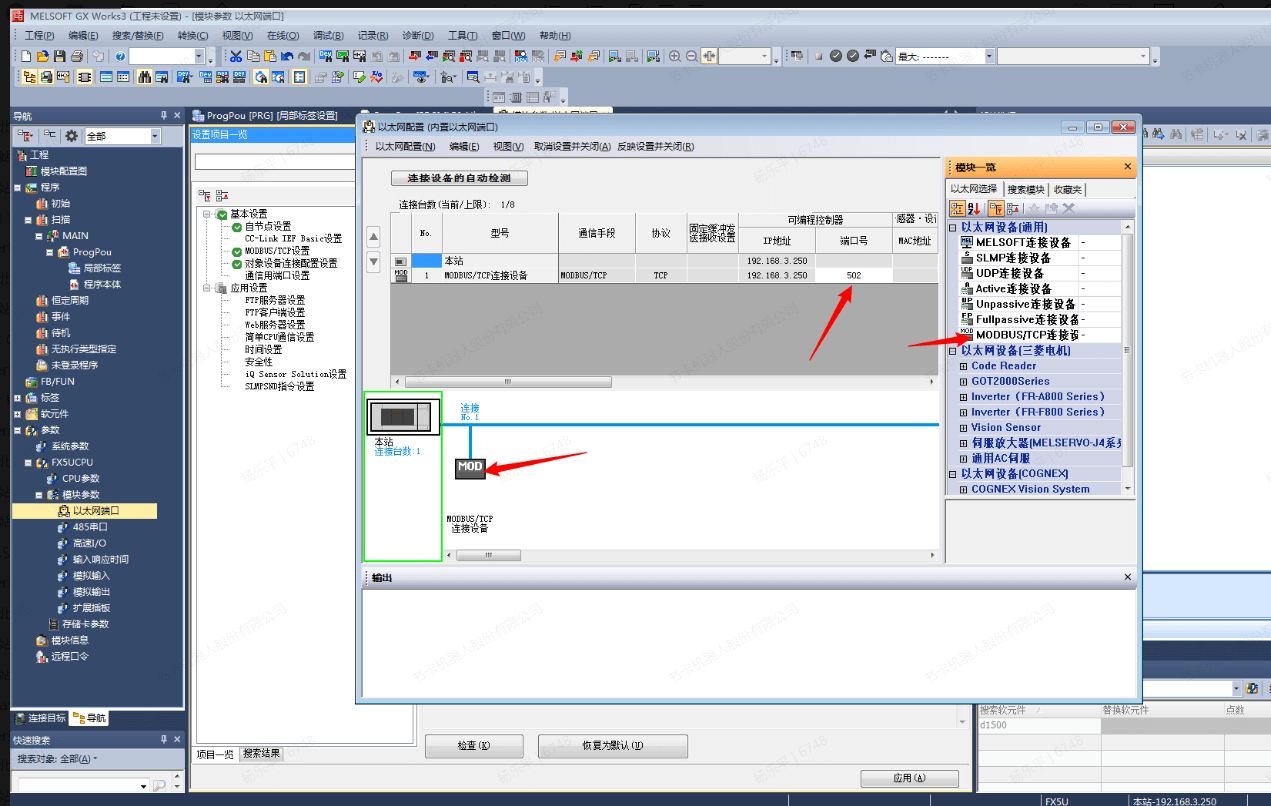
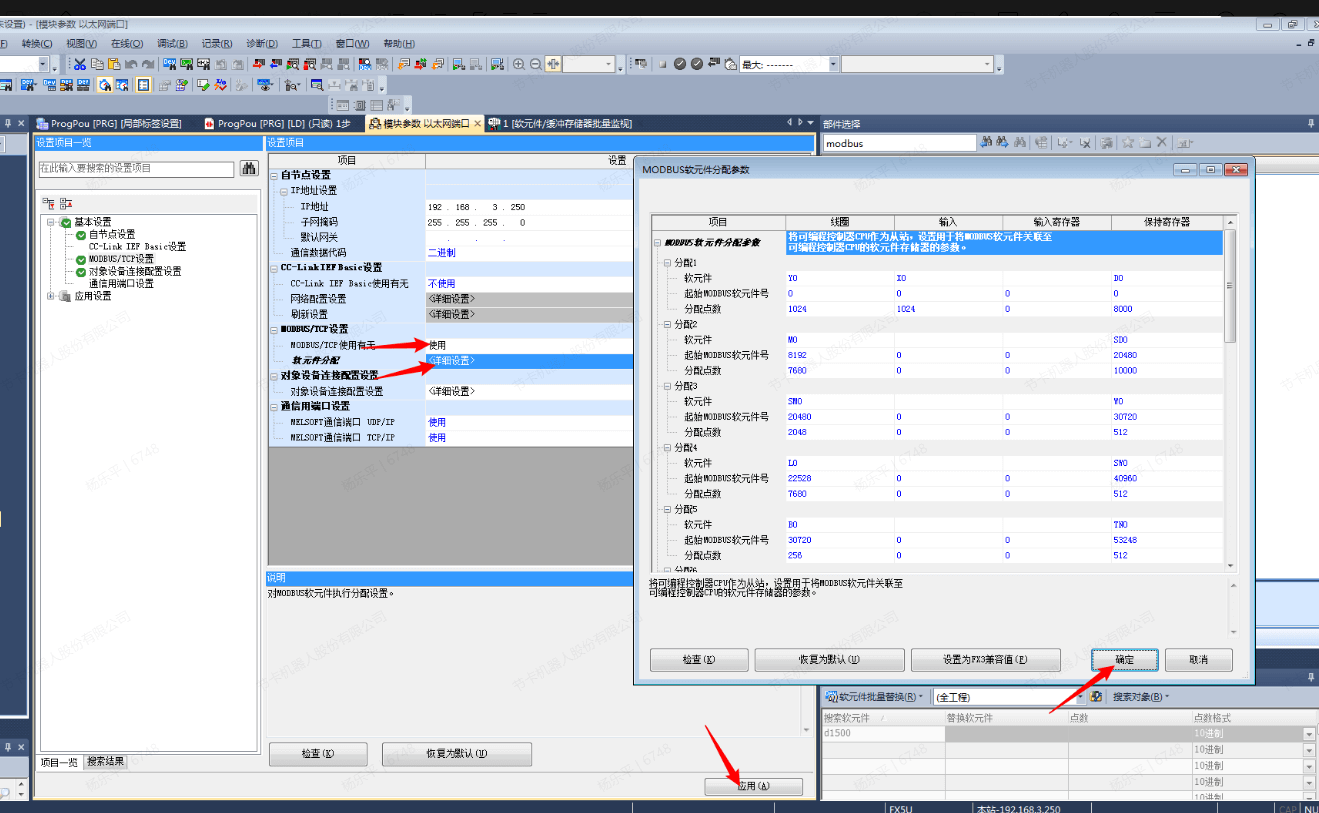
- 此时Modbus/TCP设置应显示使用,双击详细设置进入软元件分配,分配完成后点击确认,再点击应用
- 将修改后的模块参数写入PLC内,然后重置PLC
- APP此时可以运行扩展IO模块,打开软元件缓冲区批量监视,查看值是否更新到对应地址
# 主站
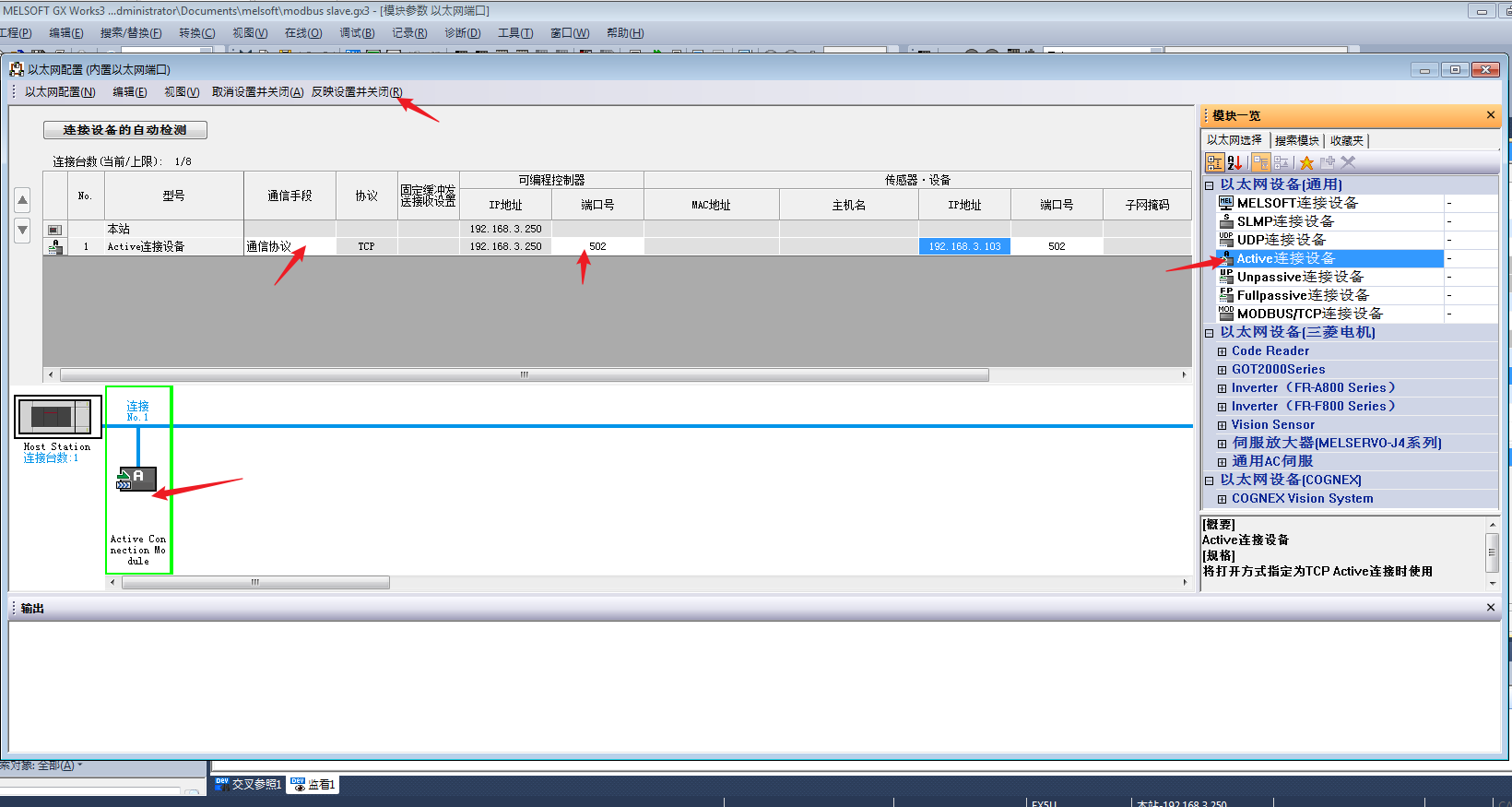
- 点击模块参数的以太网端口,双击对象设备连接配置设置的详细设置进入配置页面,拖入Active连接设备,选择通信手段为通信协议,设定端口号和IP等信息,注意三菱PLC使用Modbus只能通过502端口,设置完成后反映设置并关闭,点击应用
- 点击工具-通讯协议支持功能
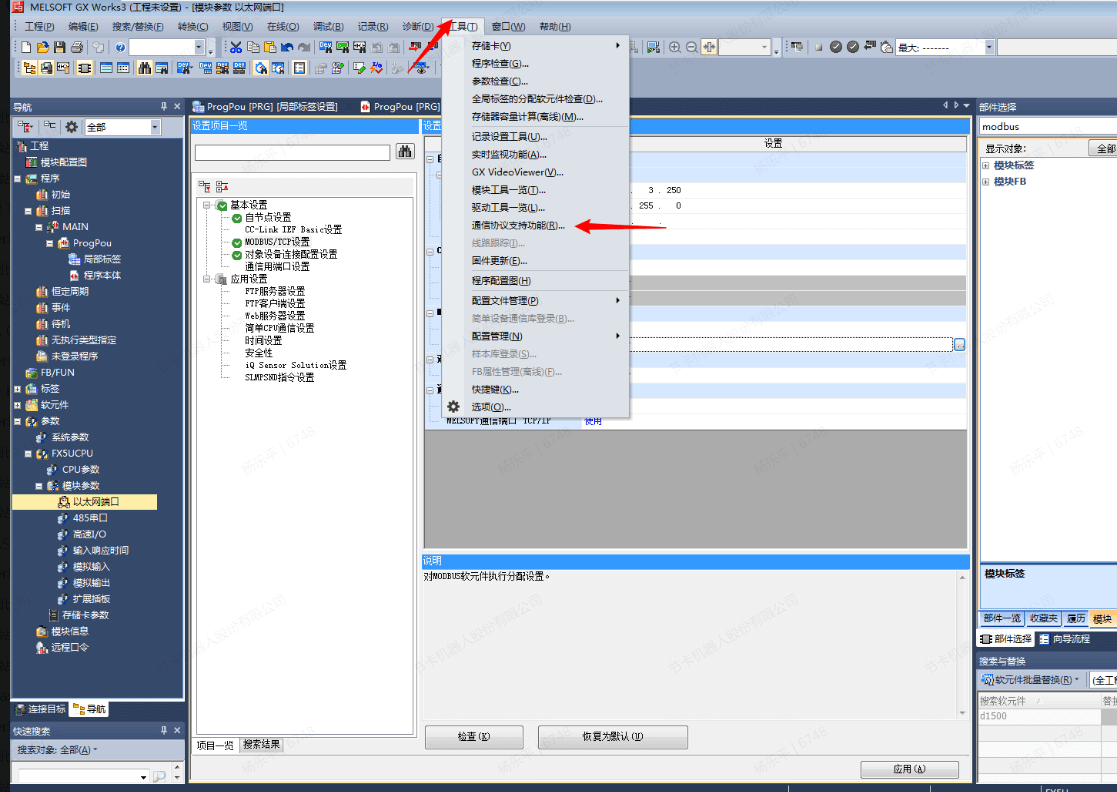
- 选择以太网,点击确定

- 点击添加,选择Modbus/TCP,并添加协议名。
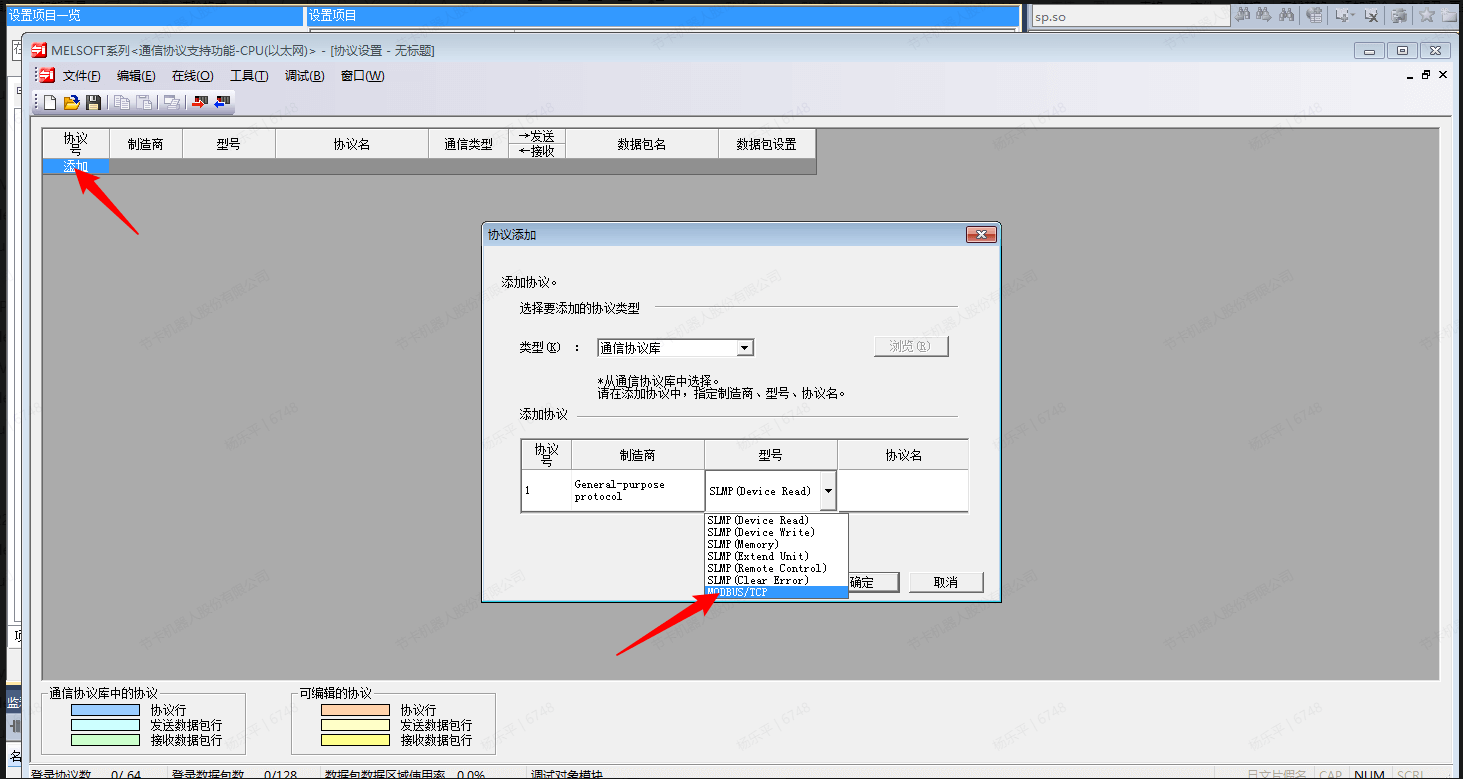
- 可以多次添加协议名,最多支持64个协议号
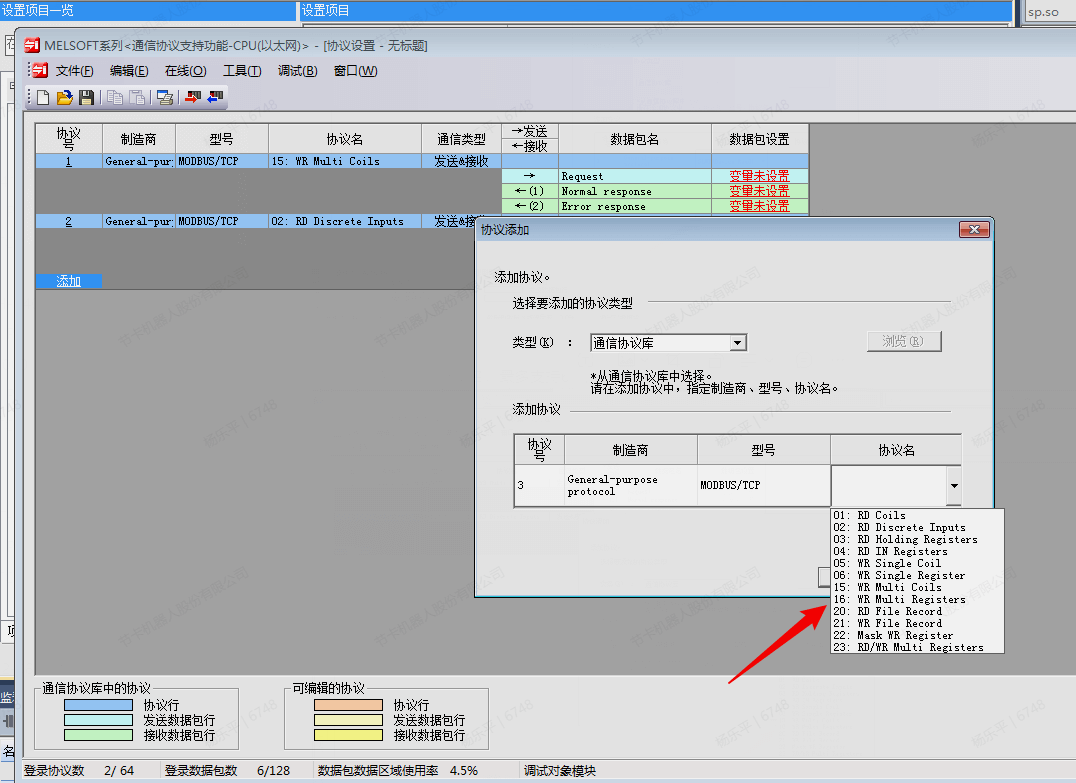
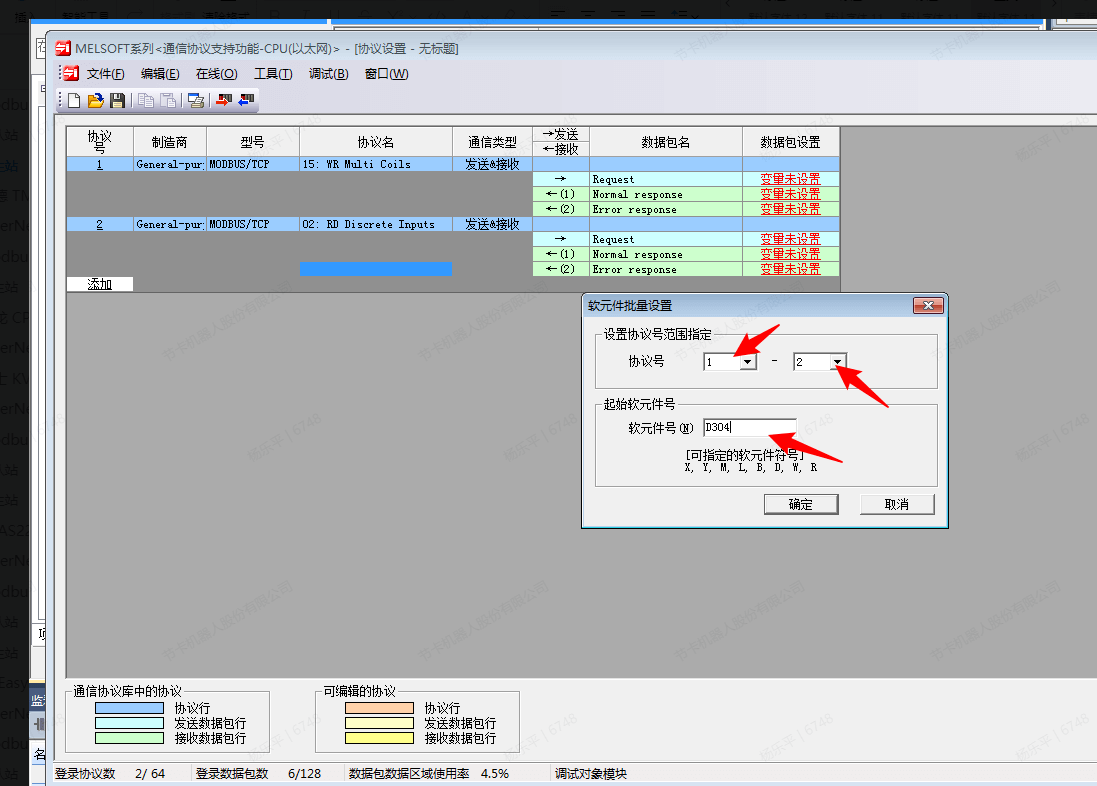
- 如果不熟悉软元件的分配方法,可以直接自动分配数据包的软元件,右键空白区域,点击软元件批量设置
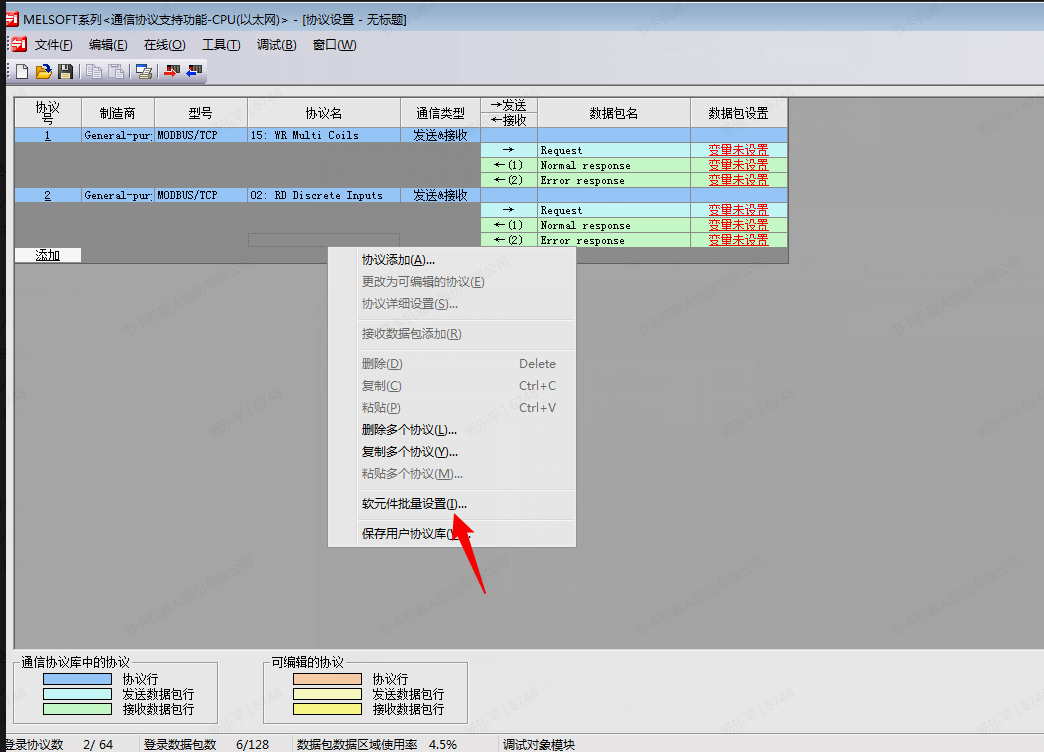
- 指定软元件的协议号范围和起始软元件号,点击确定
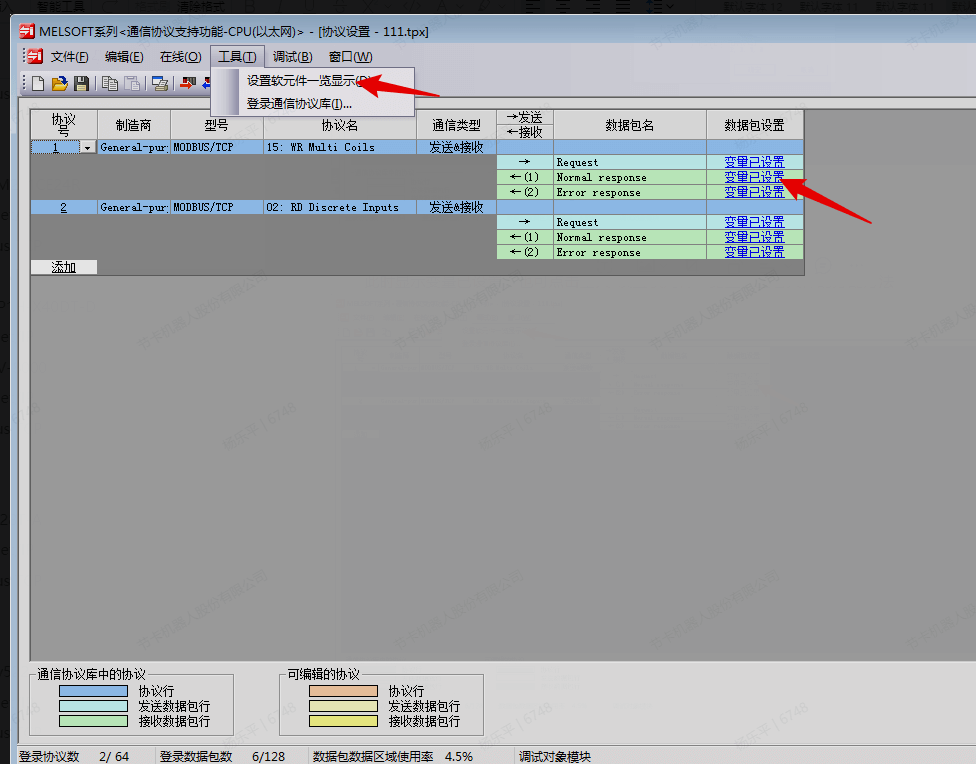
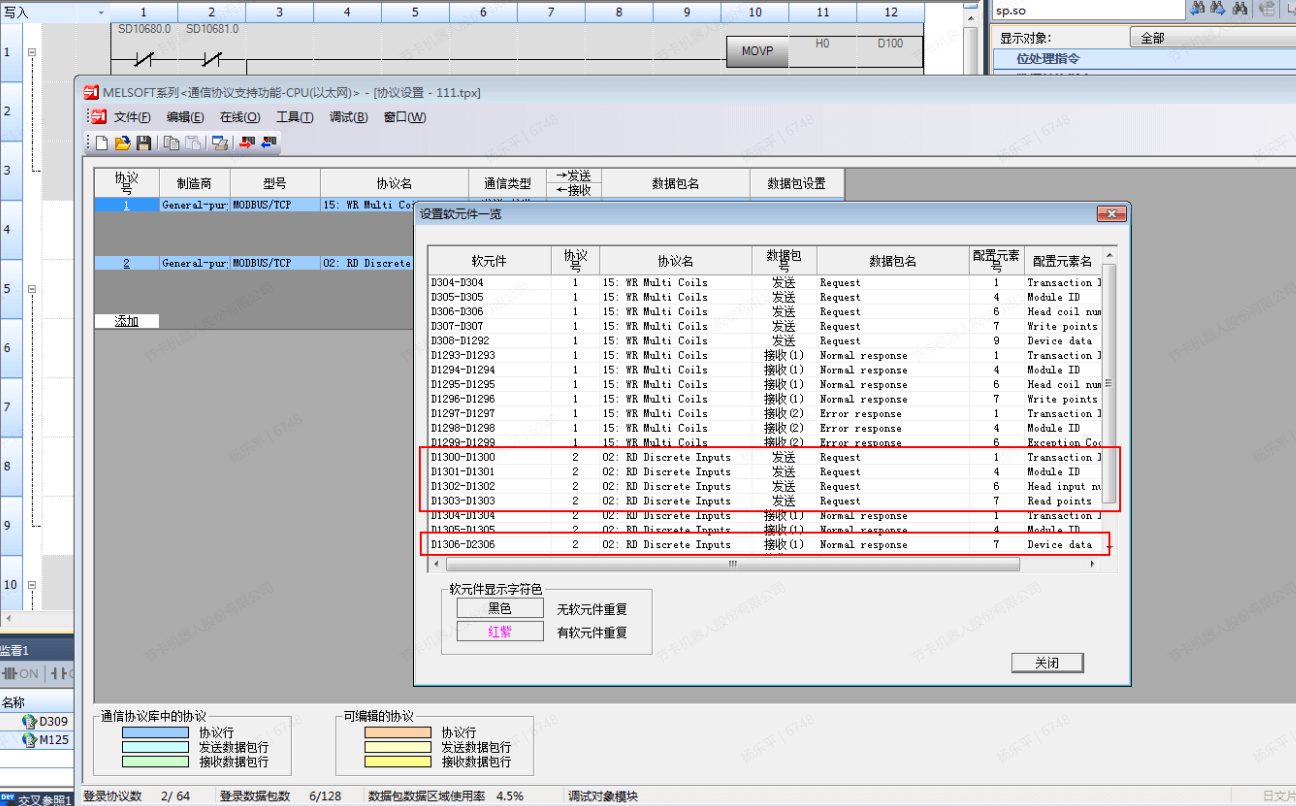
- 此时显示变量已设置,也可点击工具-设置软元件一览显示查看具体的分配方法
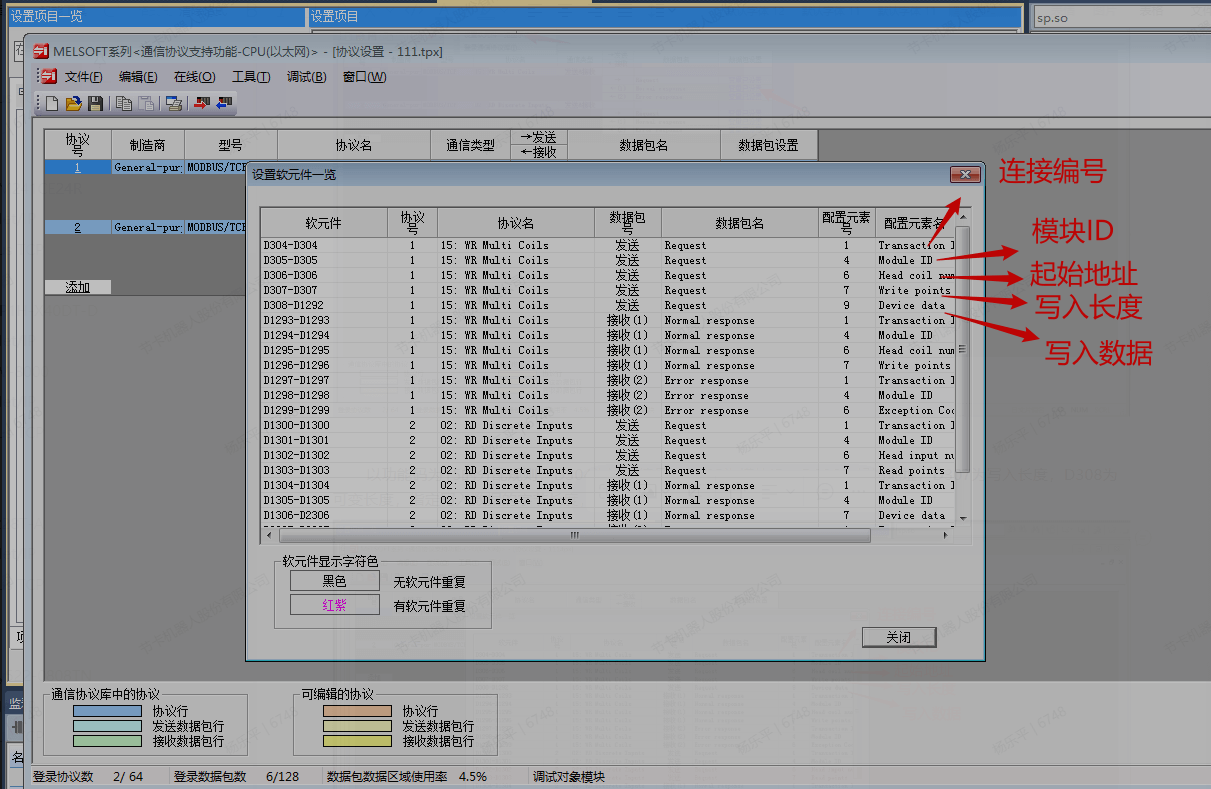
- 以功能码为15的分配规则,D304为连接编号,D305为模块ID,D306为起始地址,D307为写入长度,D308为可变长度,指定写入数据的字节长度,D309-D1292为写入的具体数据。
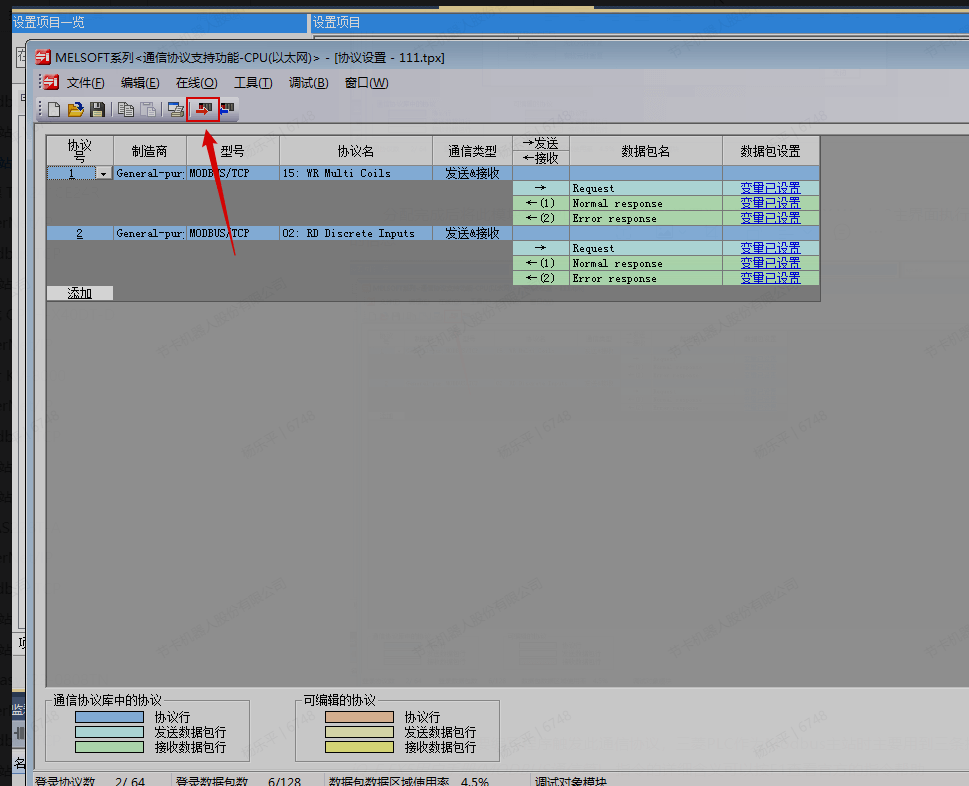
- 分配完成后将此模块写入PLC,注意此处的设置为单独写入,从GX Works3主界面执行的写入并不会写入此模块的信息
写入完成后需要编写程序触发此通信协议,三菱PLC作为Modbus主站时主要用到三条指令,可以参考MELSEC iQ-F FX5用户手册(MODBUS通信篇),指令的详细含义可以按F1查看官方的指令帮助
此处介绍一种通信方法,可根据自己的逻辑需求修改程序,使用SP.SOCOPEN打开连接

- 对连接进行设置,主要依据上述的软元件分配表的地址
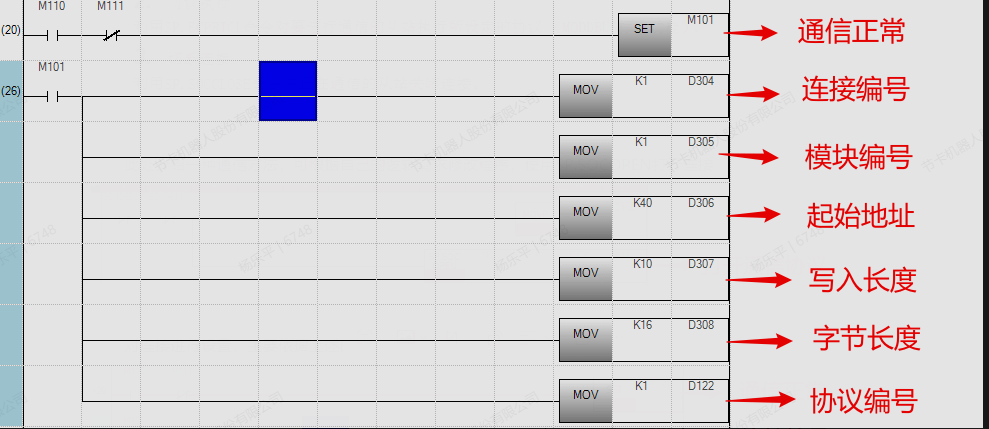
- 使用SP.ECPRTCL调用通信协议编号进行写入
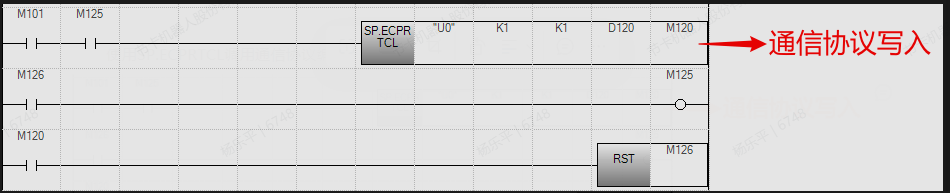
- 使用SP.SOCCLOSE关闭连接
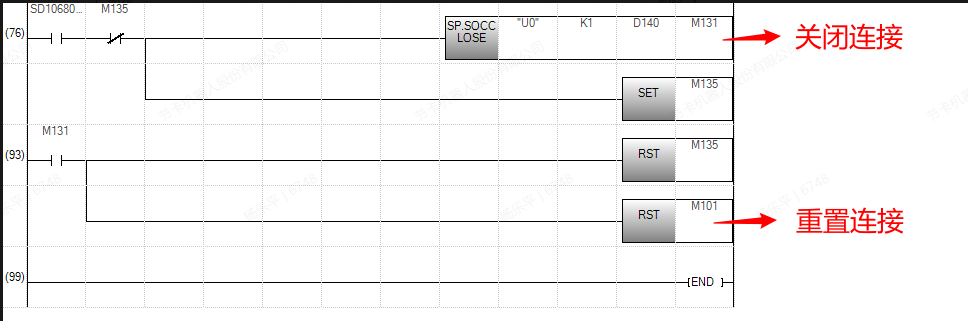
- 点击转换程序并写入PLC,此程序逻辑会循环使用通信协议编号1,由于SP.ECPRTCL不会打开关闭连接,因此使用时需要结合SP.SOCOPEN和SP.SOCCLOSE,点击监视并打开软元件/缓冲存储器批量监视
- 可以看到,值正确地更新到了对应的寄存器
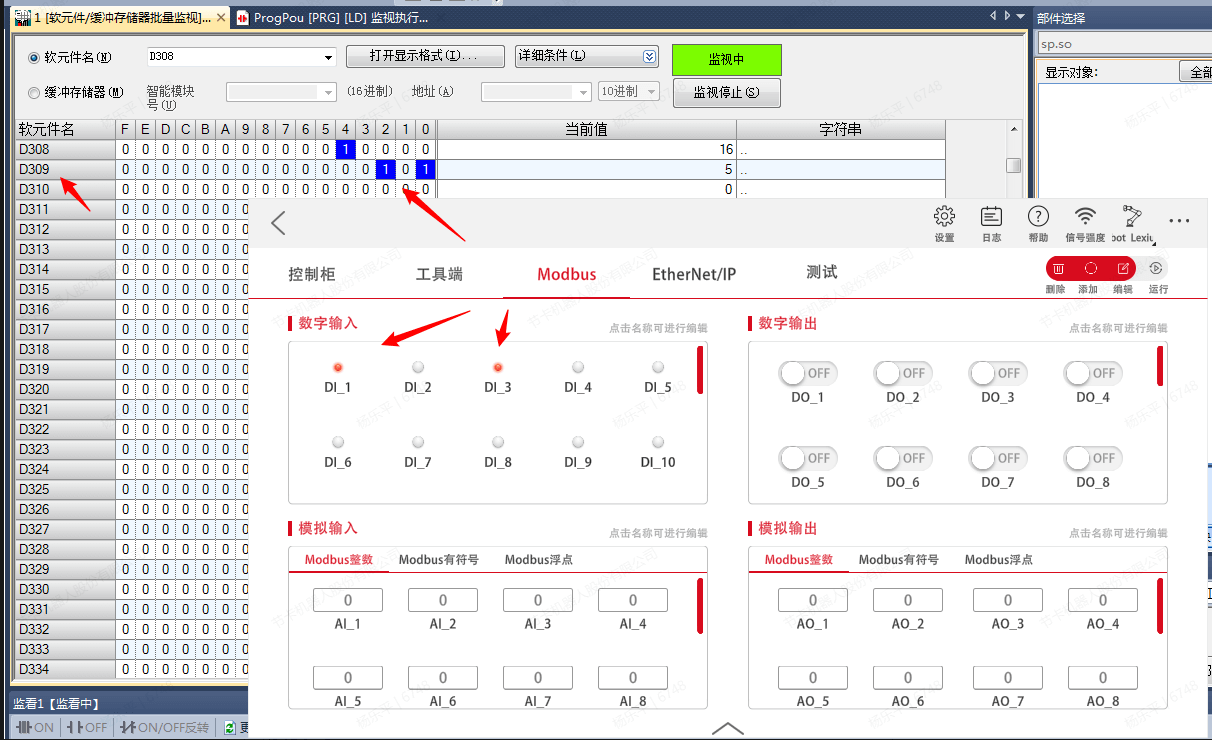
- 针对02功能码,情况类似,确认软元件的分配并修改程序即可
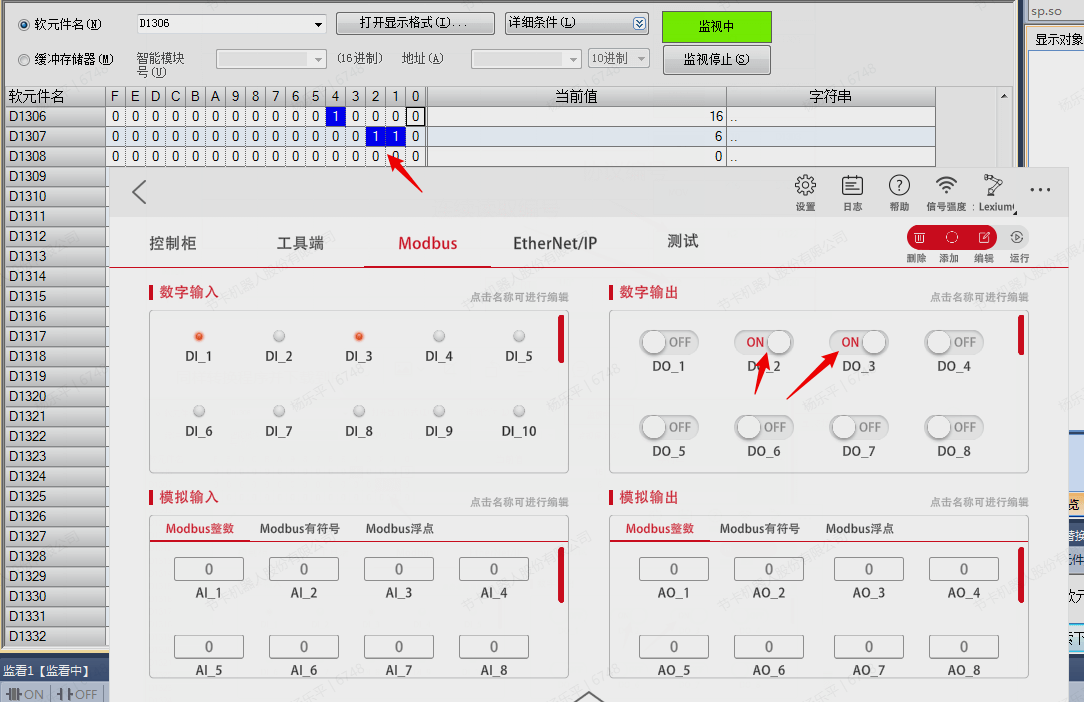
- 主要需要将协议编号和连续读取编号修改为2
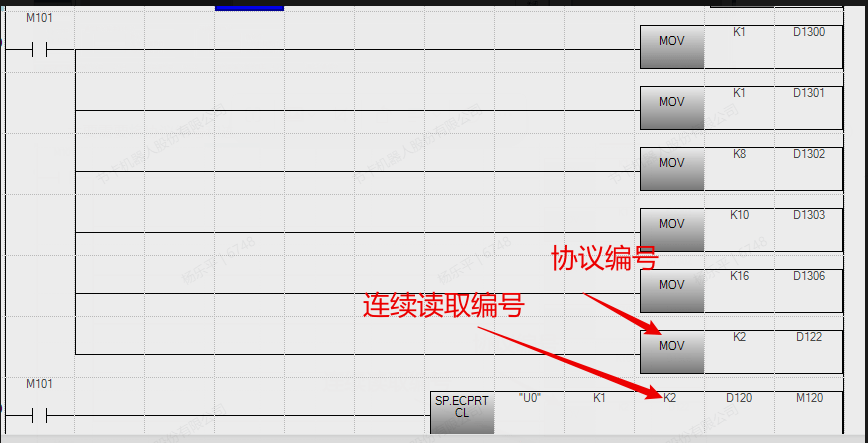
- 同样转换程序并下载到PLC,可以看到DO的值更新到了D1307中
# 施耐德 TM241CE24R
所需软件:Machine Expert,JAKA Zu APP
# EtherNet/IP
首先需要确保TM241CE24R的固件版本与Machine Expert匹配,否则无法正常使用,如果版本不对使用controller assistant升降级固件版本。
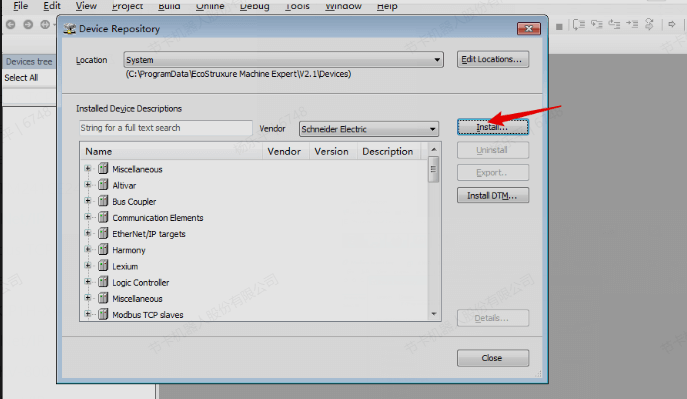
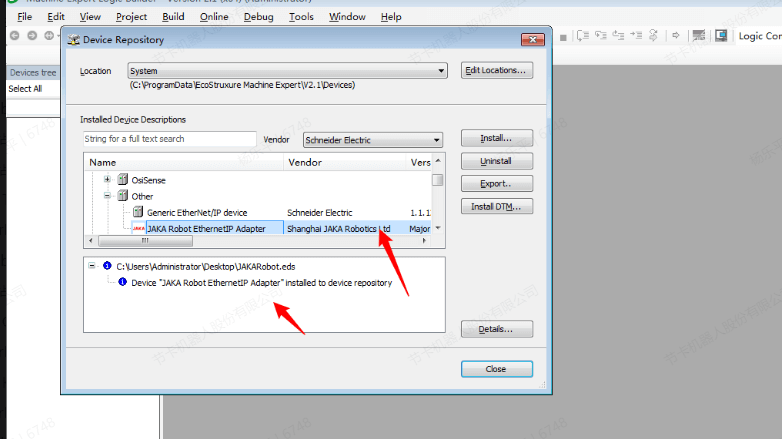
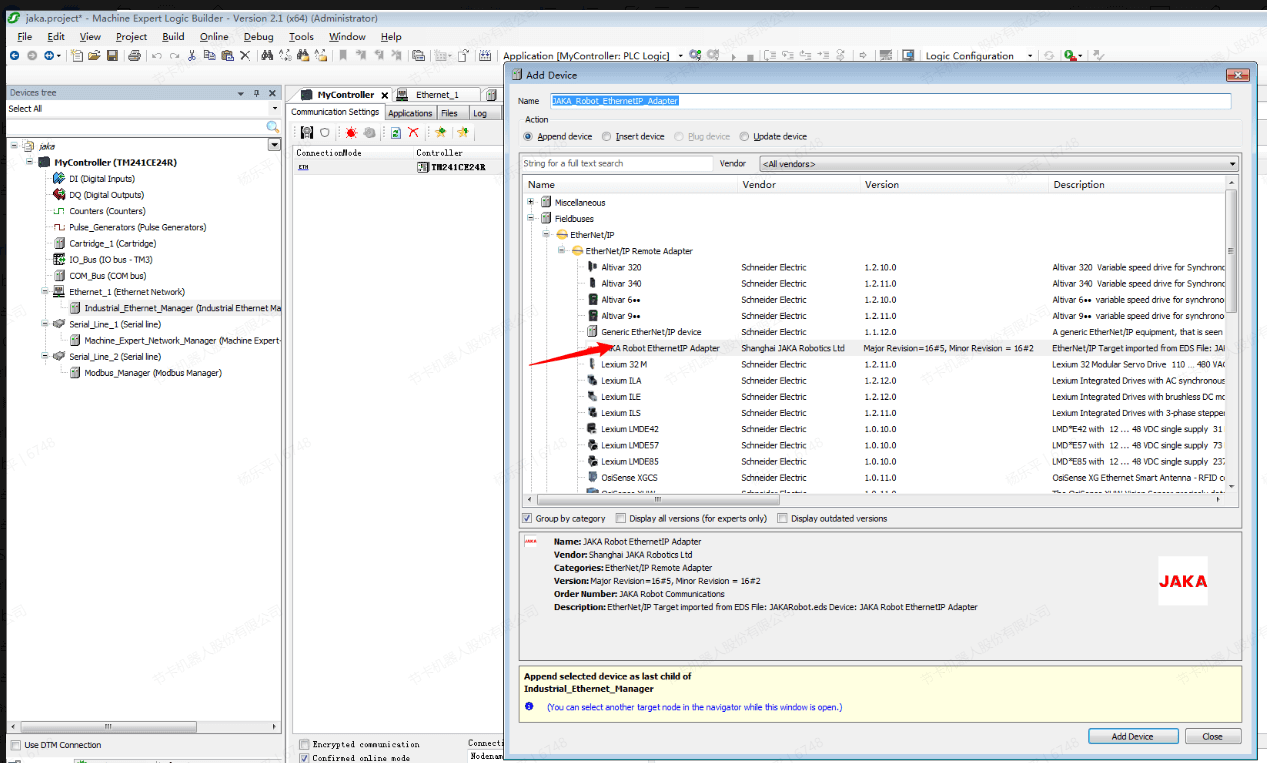
- 使用Machine Expert添加eds文件
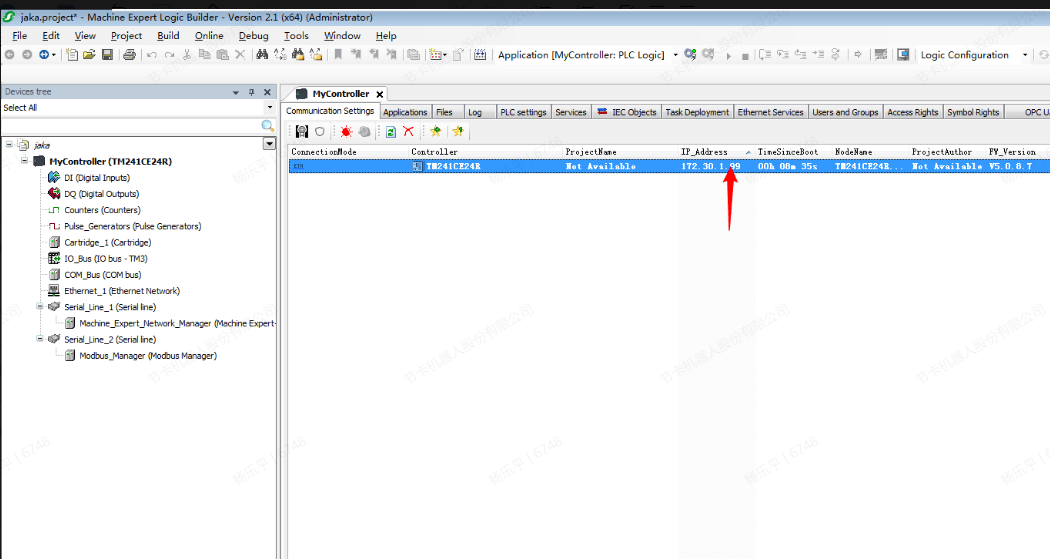
- 双击控制器点击刷新可以看到当前连接设备,也可以通过网线直连修改外部设备的IP地址
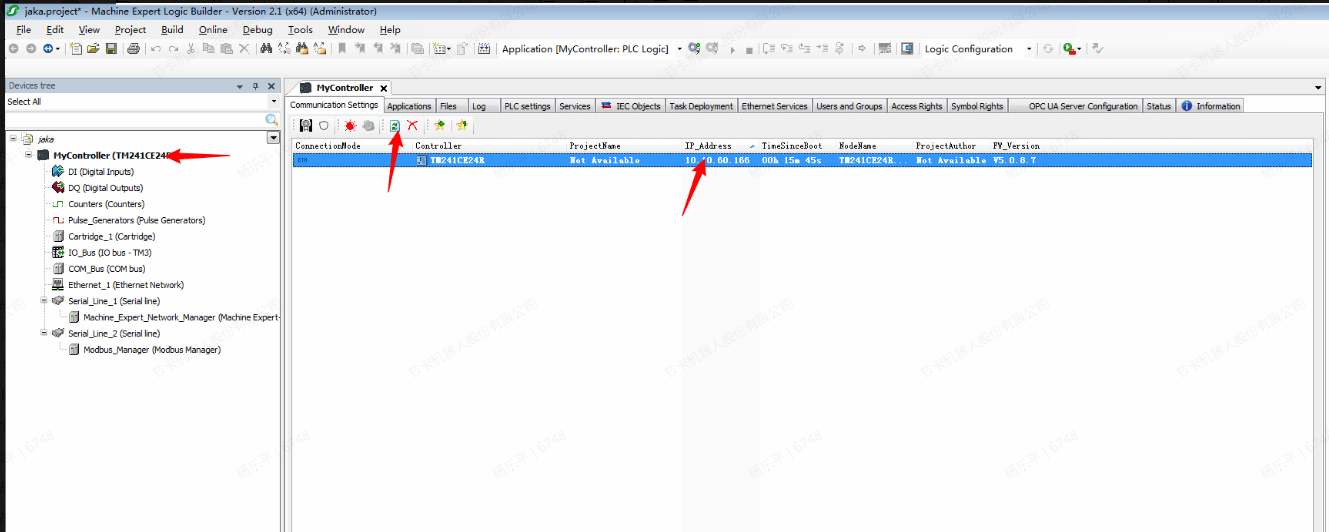
- 修改时勾选永久保存
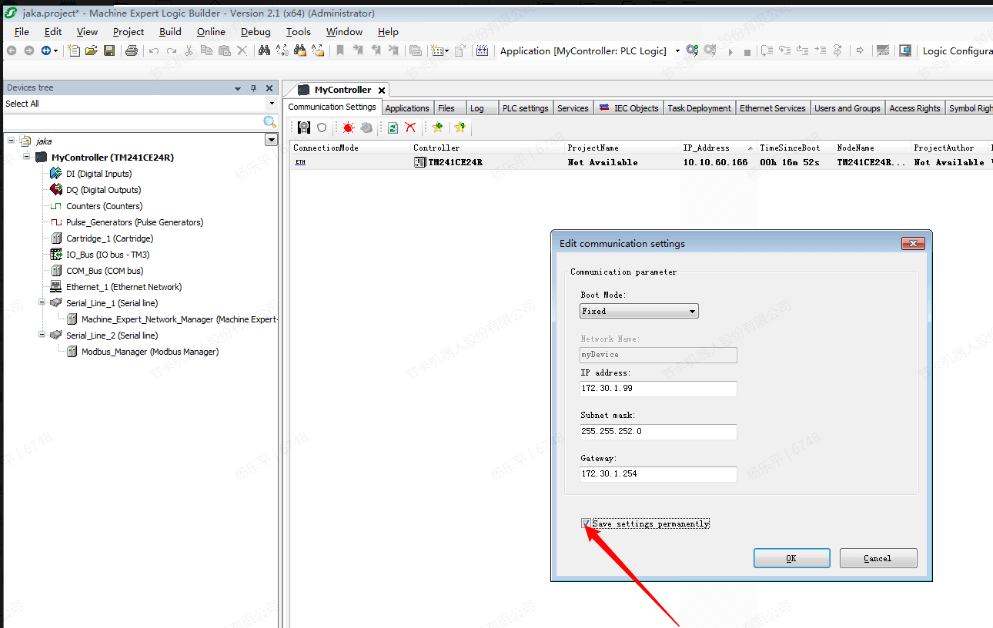
- 此时已经成功修改,将TM241CE24R连接在交换机,JAKA APP与控制器也接入此交换机并保持均在同一网段
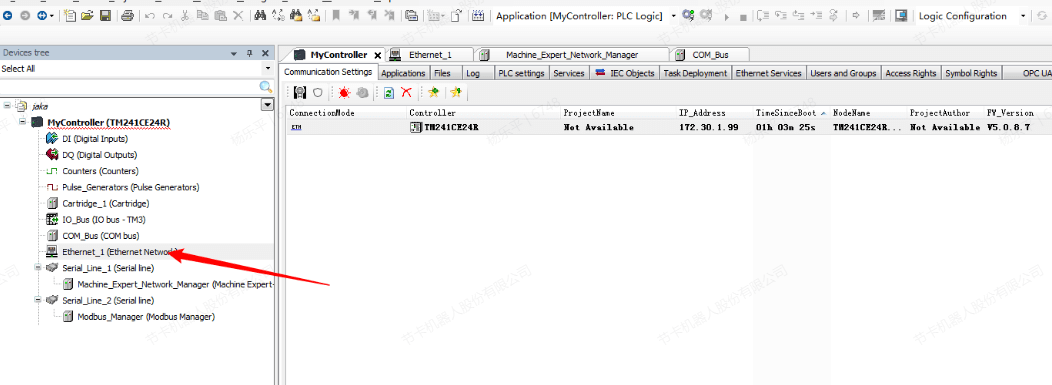
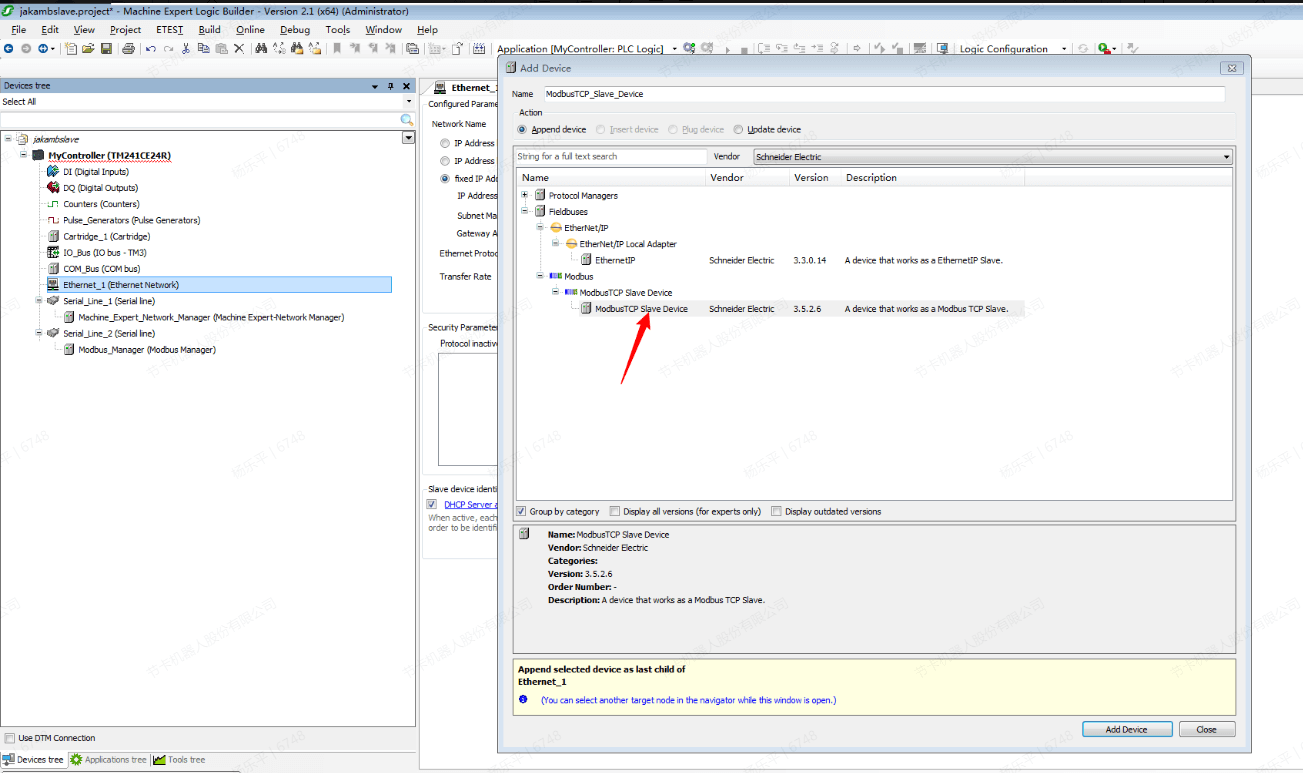
- 右键点击Ethernet_1添加设备
- 选择Modbus TCP下的Industrial Ethernet Manager
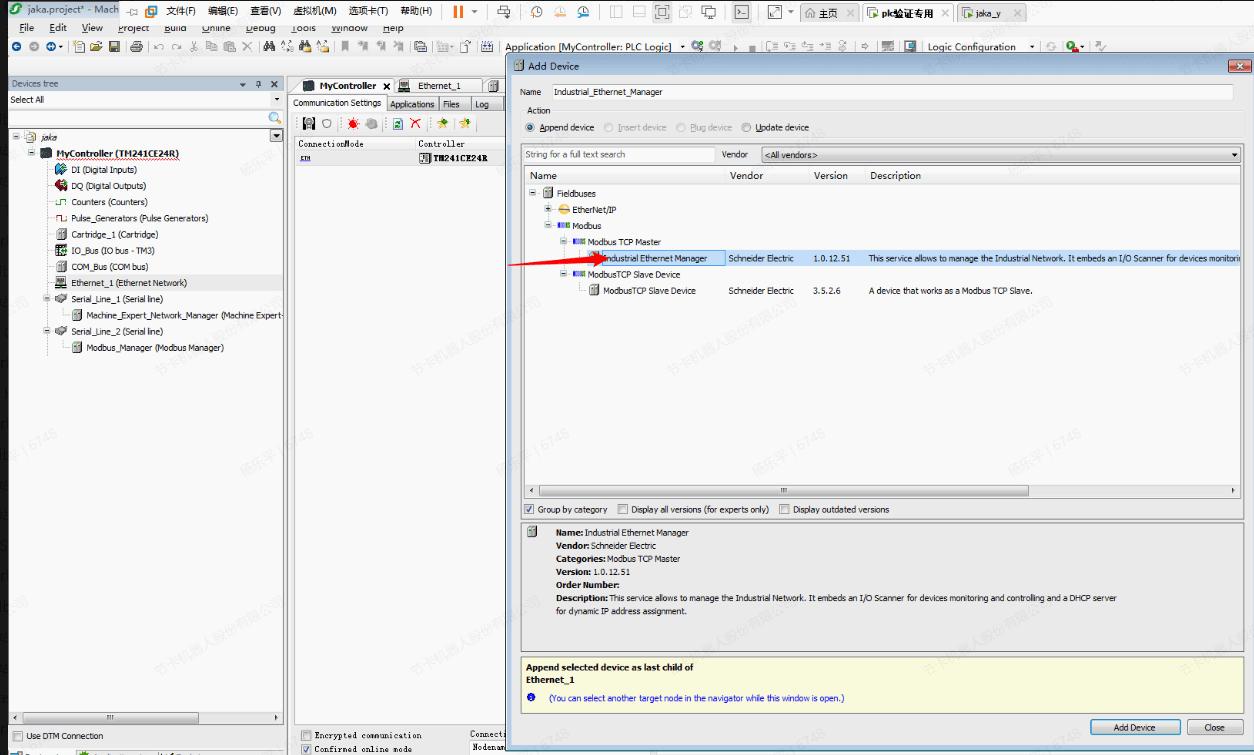
- 继续右键点击Industrial Ethernet Manager添加JAKA设备
- 编译并登录设备,如果提示安全相关,无视并按ALT+F8继续登录
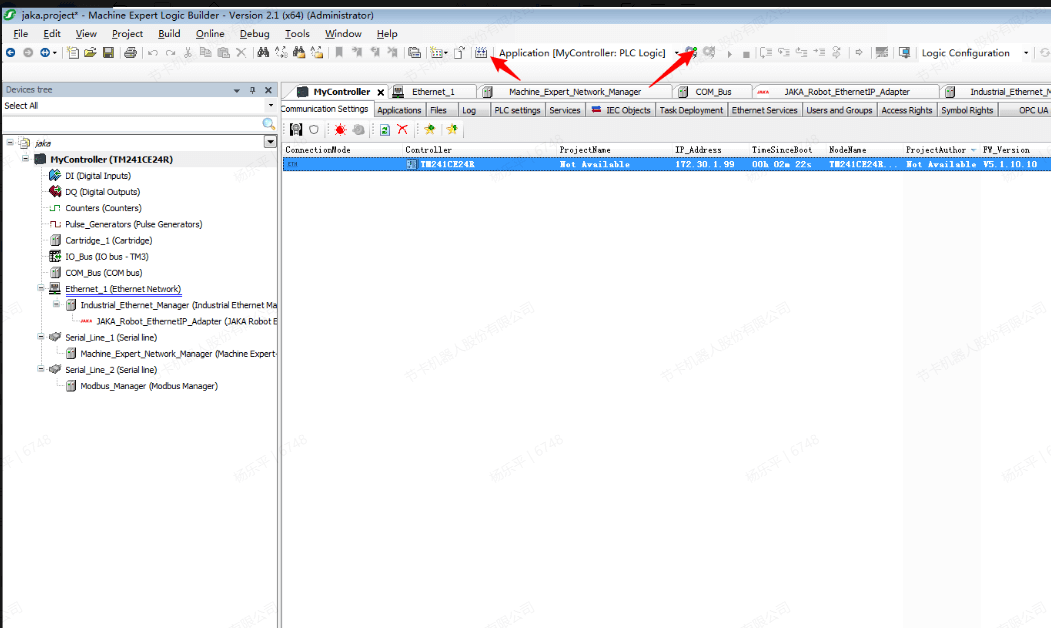
- 改为始终使能后,点击开始
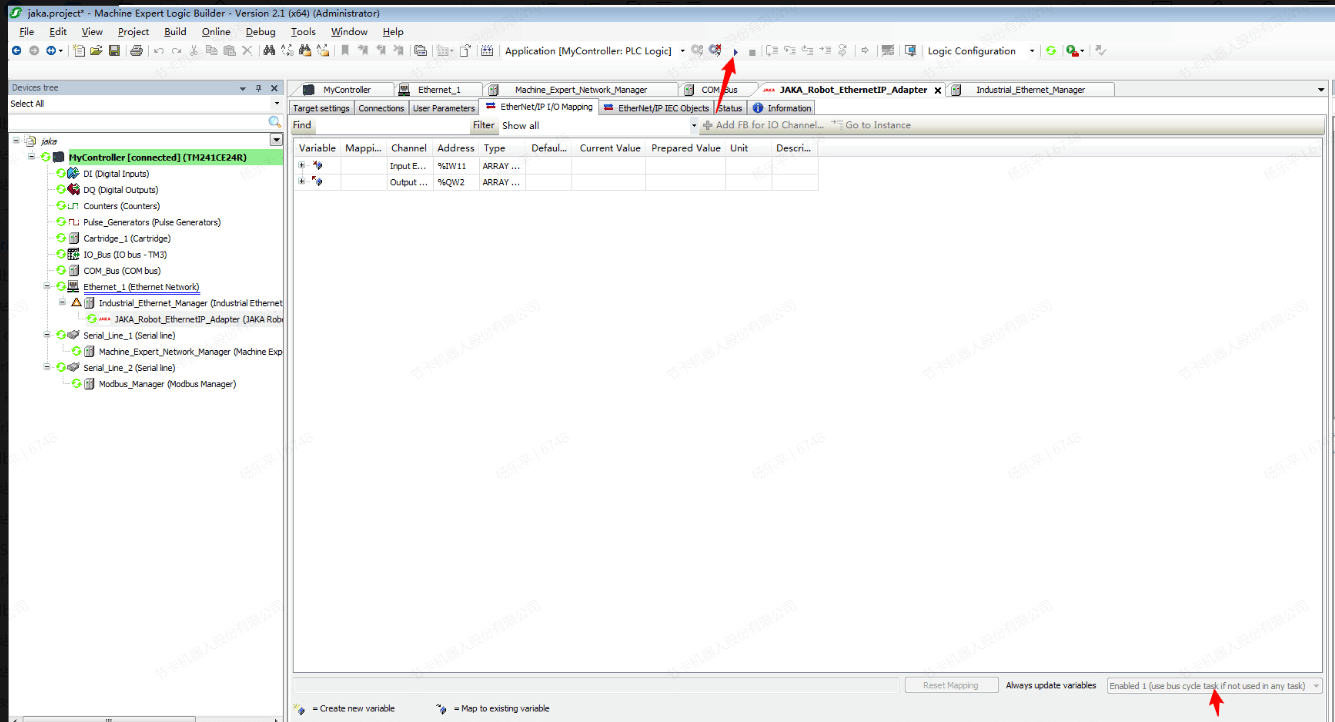
- 此时APP侧应显示成功连接主站

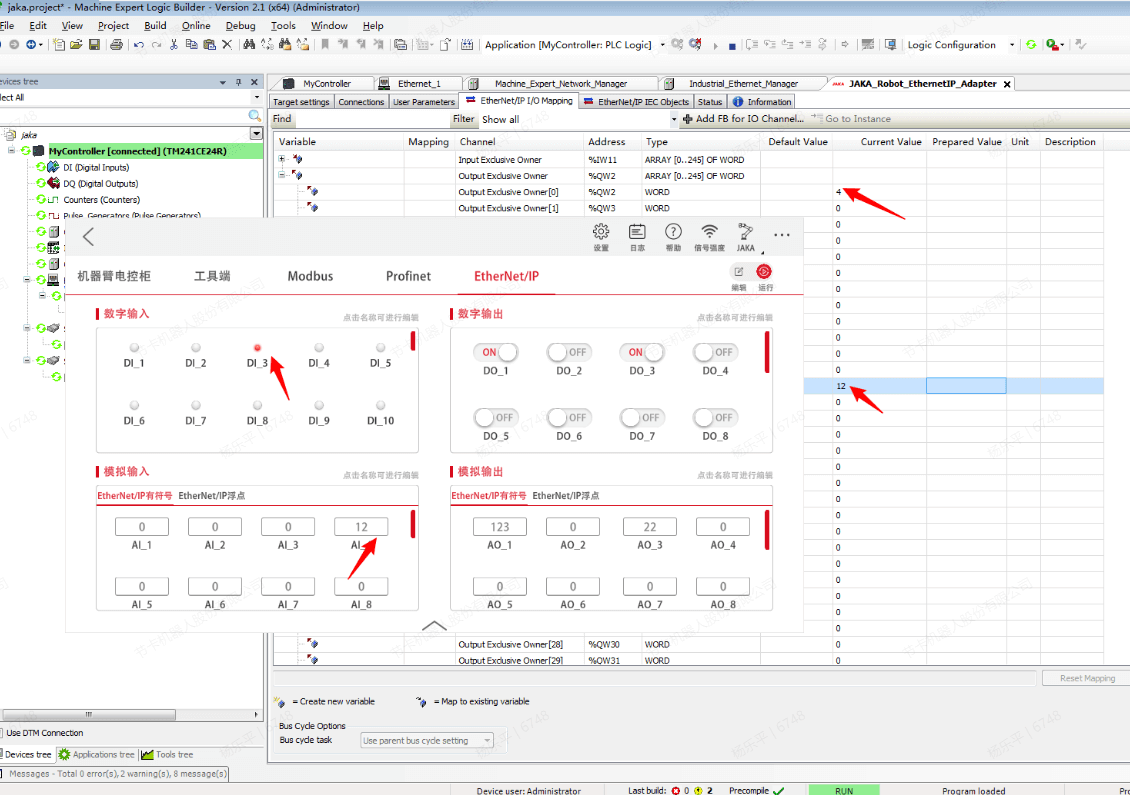
- 修改DO和AO的值,可以看到对应的Input Exclusive owner[144]、[150]、[154]和发生了变化,这是由于从ROBOT到PLC的数据包含了ROBOT的状态数据,因此DO是从72开始的,JAKA的EtherNet/IP使用32位数据,而Machine Expert使用16位数据,因此最终DO的地址从144开始
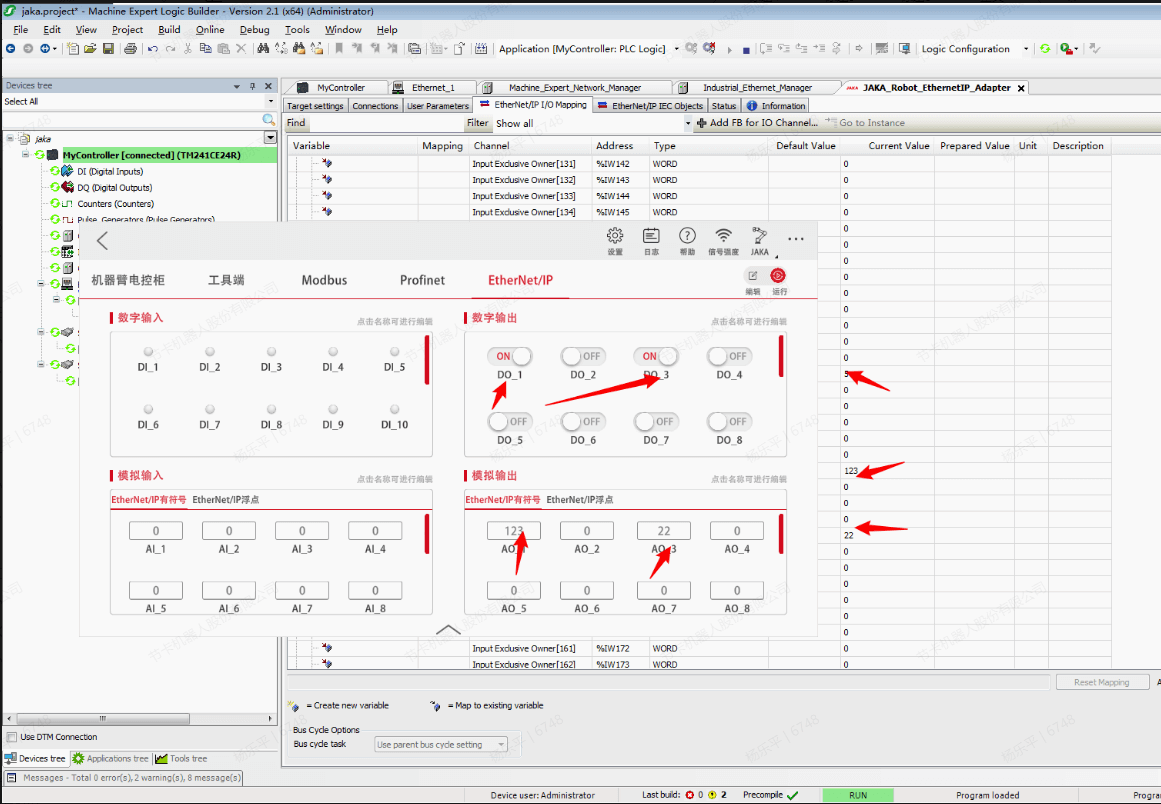
- 在输出中使用ctrl+F7将值传递给机器人,值同样正常更新
# Modbus TCP
# 主站
- 右键点击Ethernet_1添加modbus slave设备
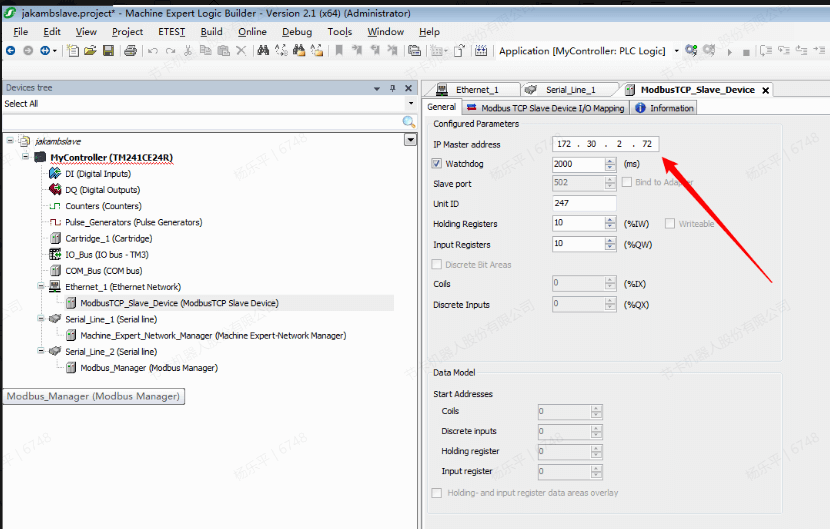
- 设置主站的IP地址等信息
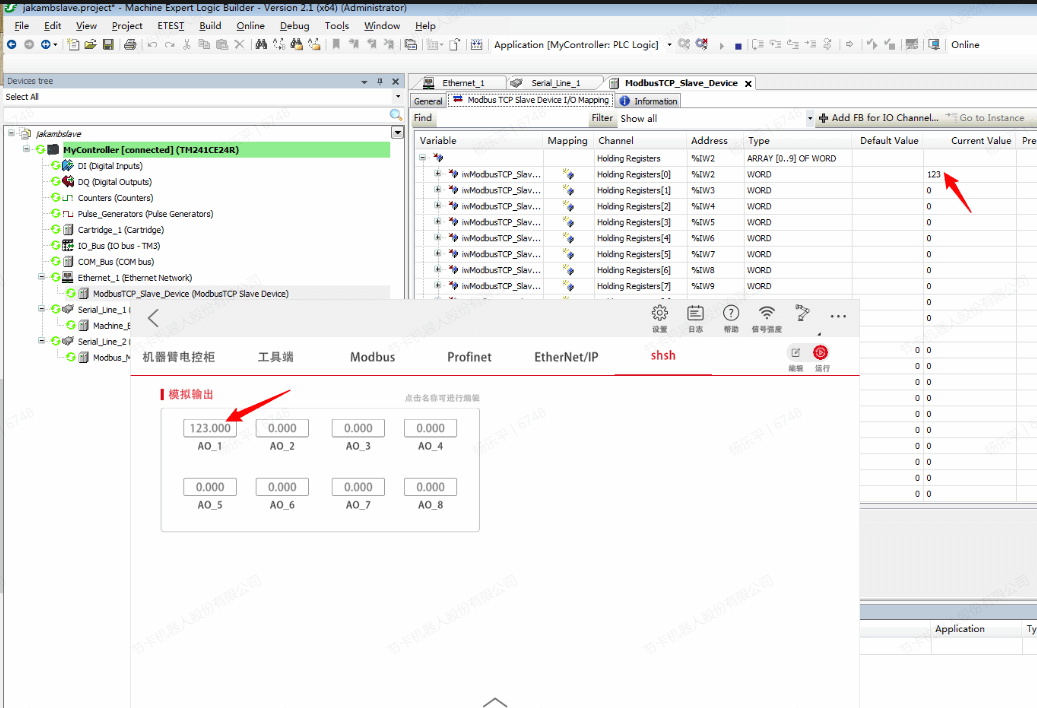
- 登录并开始,监视数据
- TM241CE24R支持的modbus从站的保持寄存器的功能码为03、06和16,而输入寄存器支持的功能码为17,JAKA机器人modbus主站暂不支持此功能码,使用前需要查阅官方文档
# 欧姆龙 CP1H-X40DT-D
所需软件:CX-Programmer,JAKA Zu APP
CP1H的CPU单元本身不带EIP的功能,因此需要装扩展单元,在此之前需要先再装一个CJ1W-EXT01扩展单元以支持扩展,安装后的产品如图:
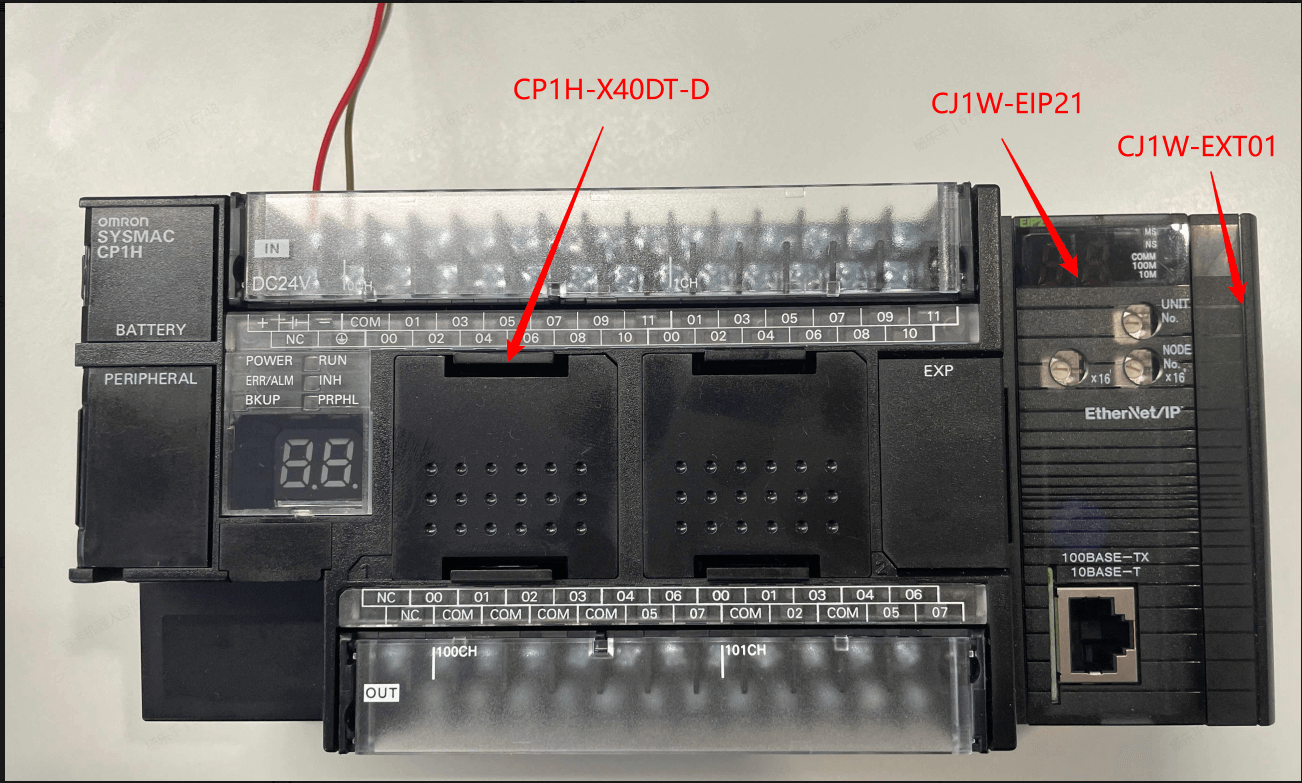
由于欧姆龙的modbus均属于无协议通讯,也即通过软件实现其通信,而且需要额外选装硬件,如需要CJ1W-ETN21支持modbustcp和 CP1W-CIF11支持modbusrtu,因此不对其做验证。
# EtherNet/IP
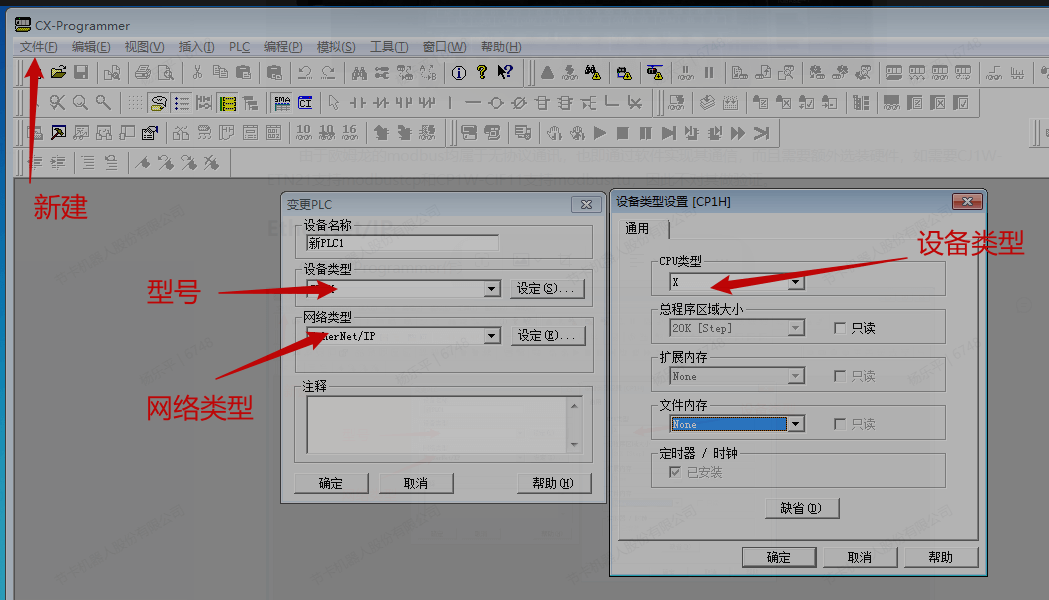
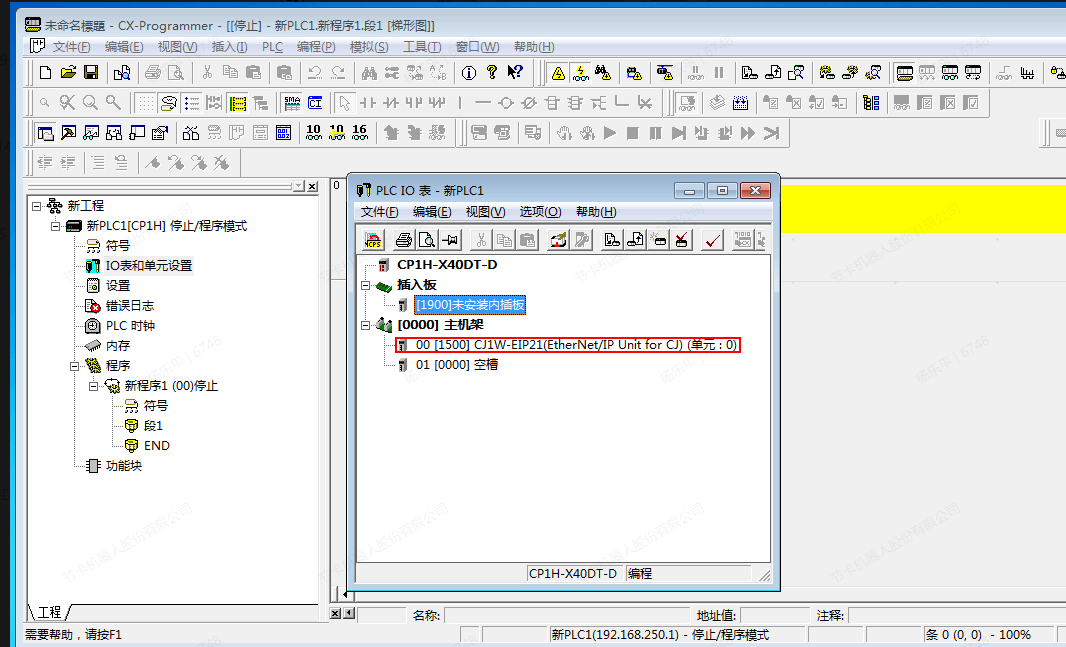
- 使用CX-Programmer作为上位机,新建工程
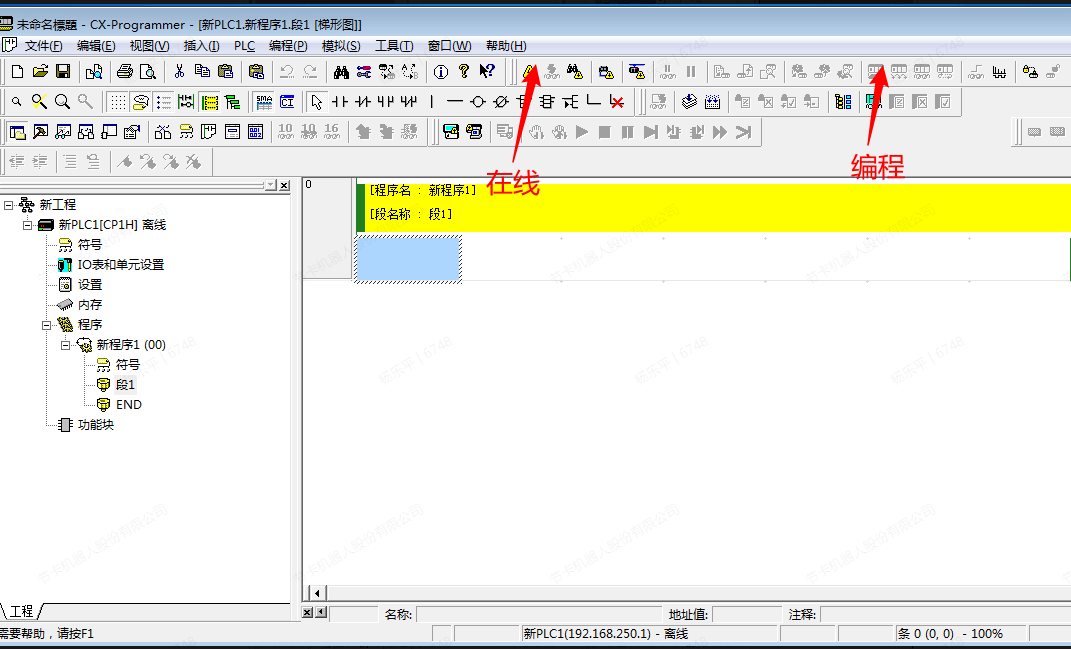
- PLC默认的地址为192.168.250.1,先使用网线直连,切换到在线模式并开启编程才能修改参数
- 创建IO表,初始化CPU总线
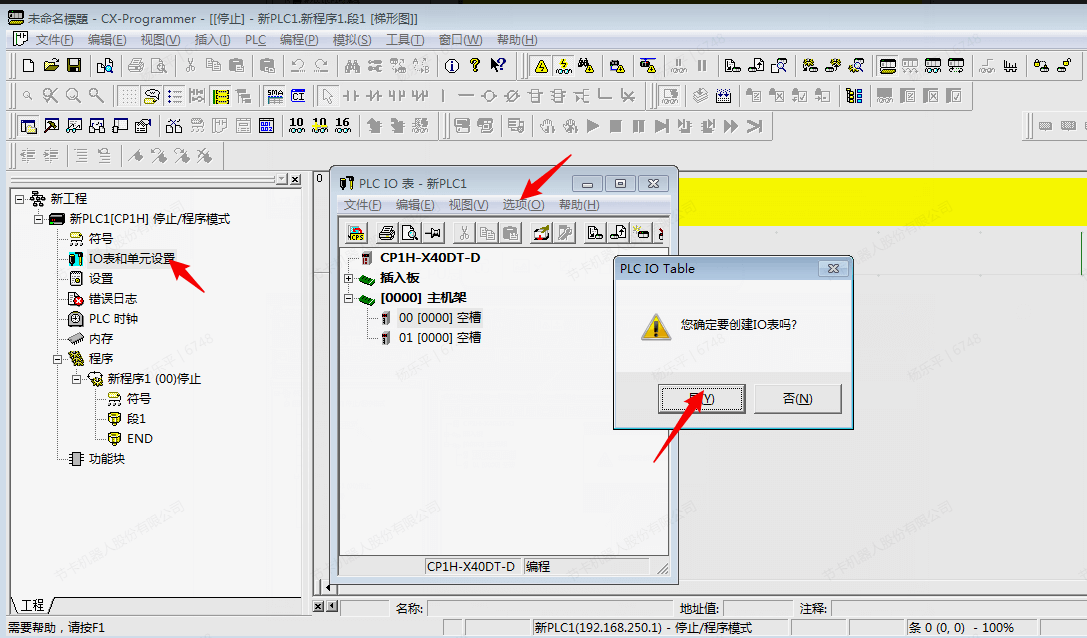
- 此时有了EIP模块
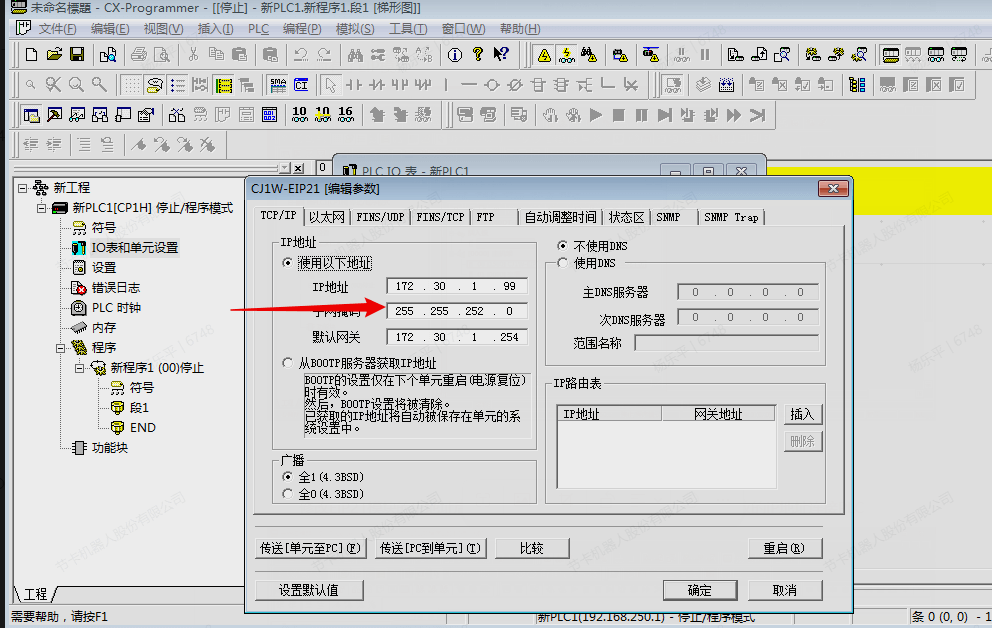
- 修改EIP21模块的IP地址后,将参数从PC传递至单元并重启,使用修改的IP地址连接PLC
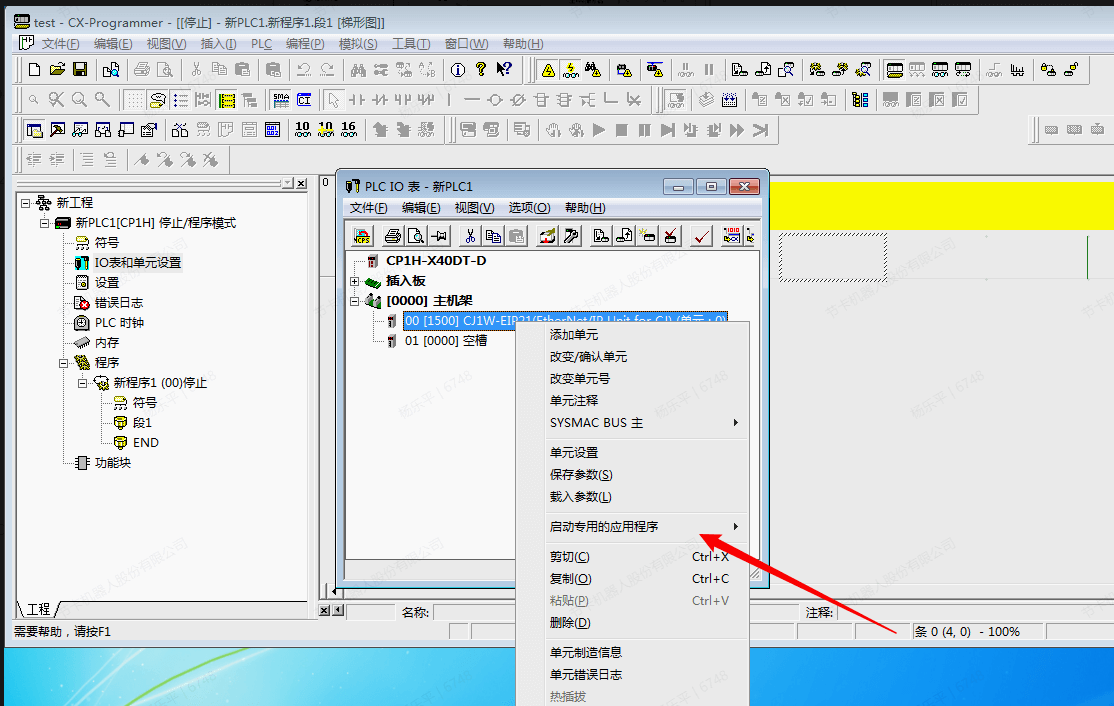
- 启动专用的应用程序,继承启动
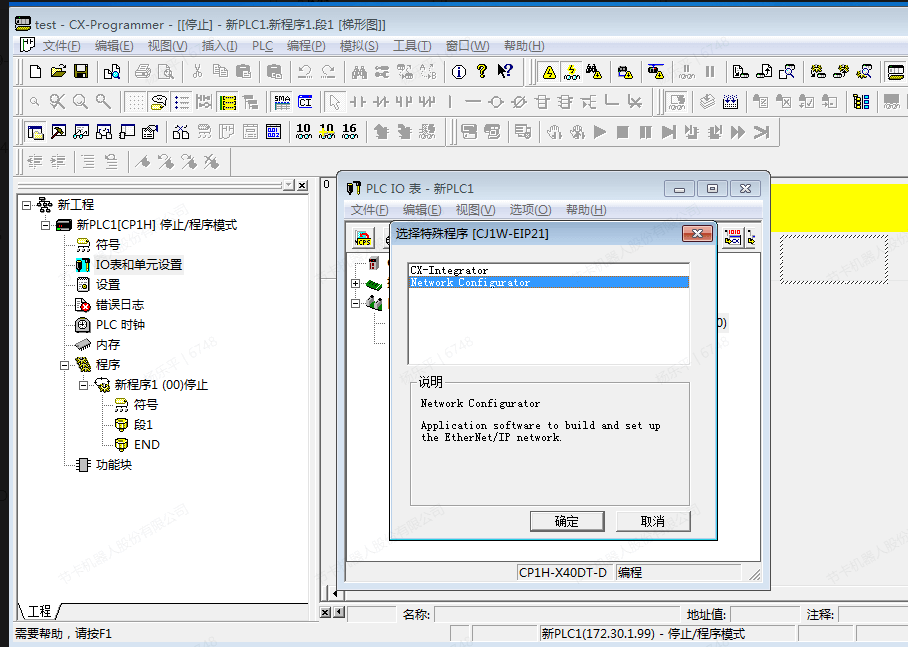
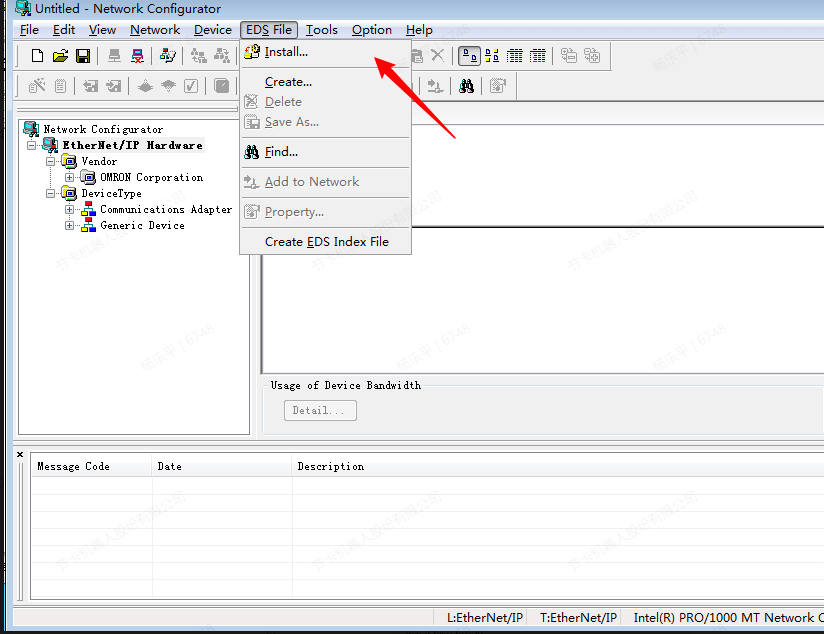
- 点击“Network Confihurator”进行EIP设定
- 点击“Install”安装eds文件
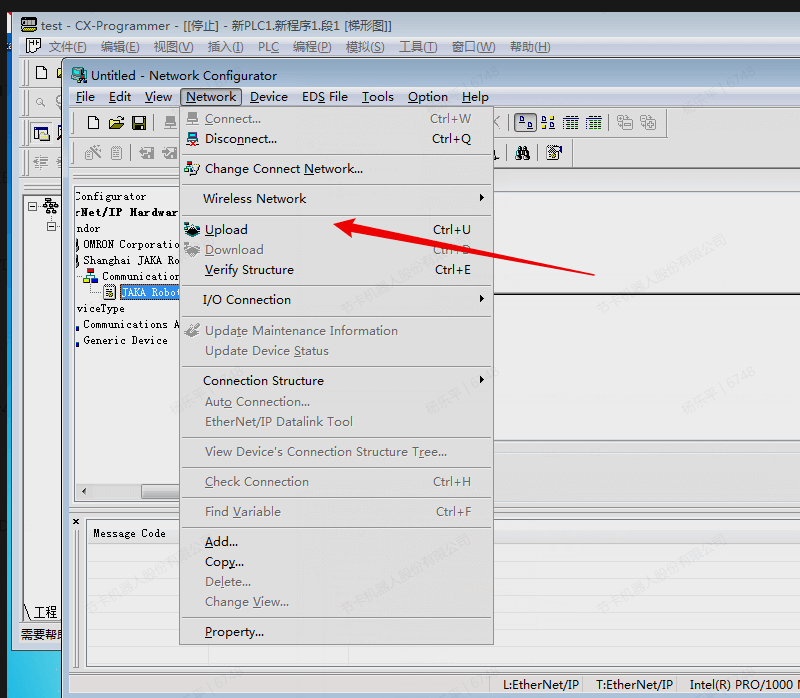
- 点击“Upload”
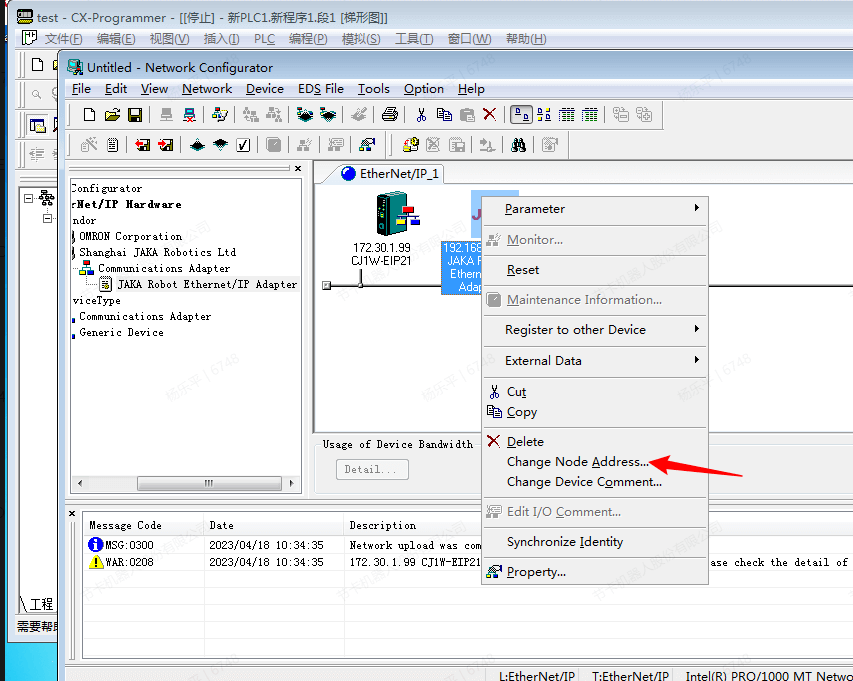
- 将导入的设备拖到总线,点击“Change Node Address…”修改IP地址
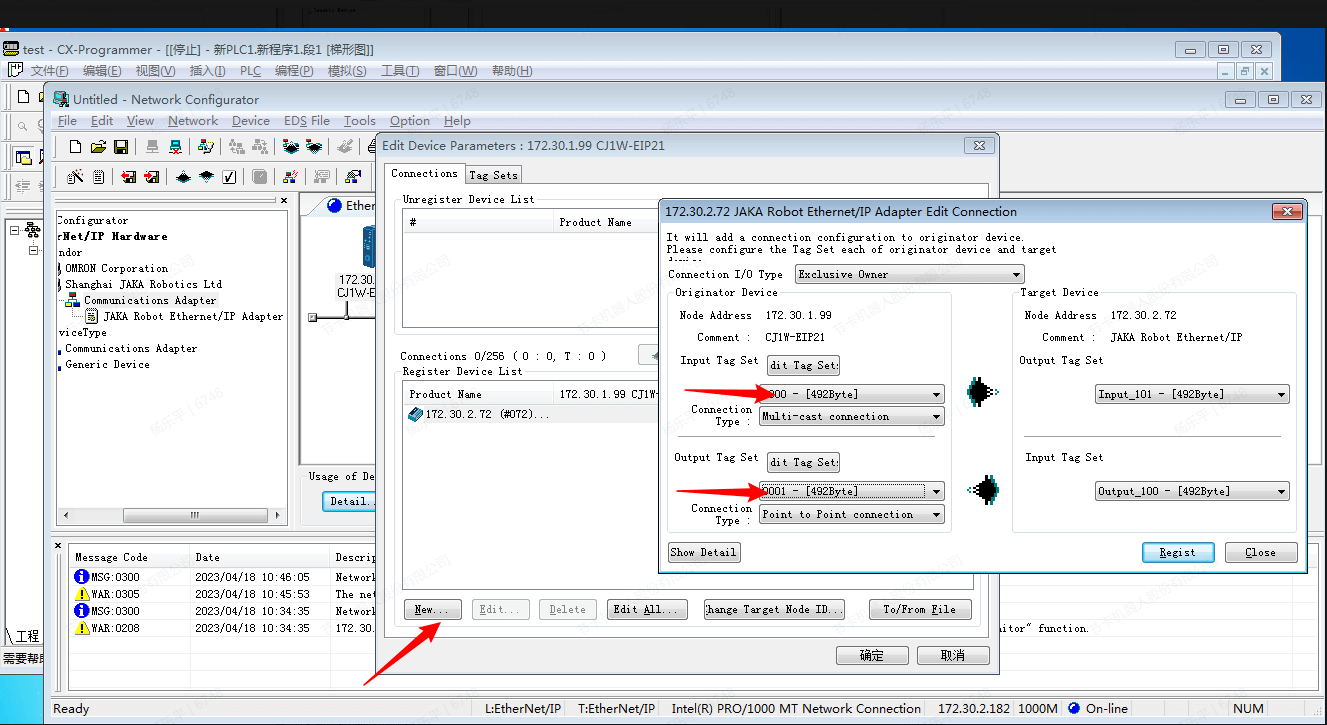
- 连接注册:点击“JAKA Robot Ethernet/IP Adapter”→“Connections”
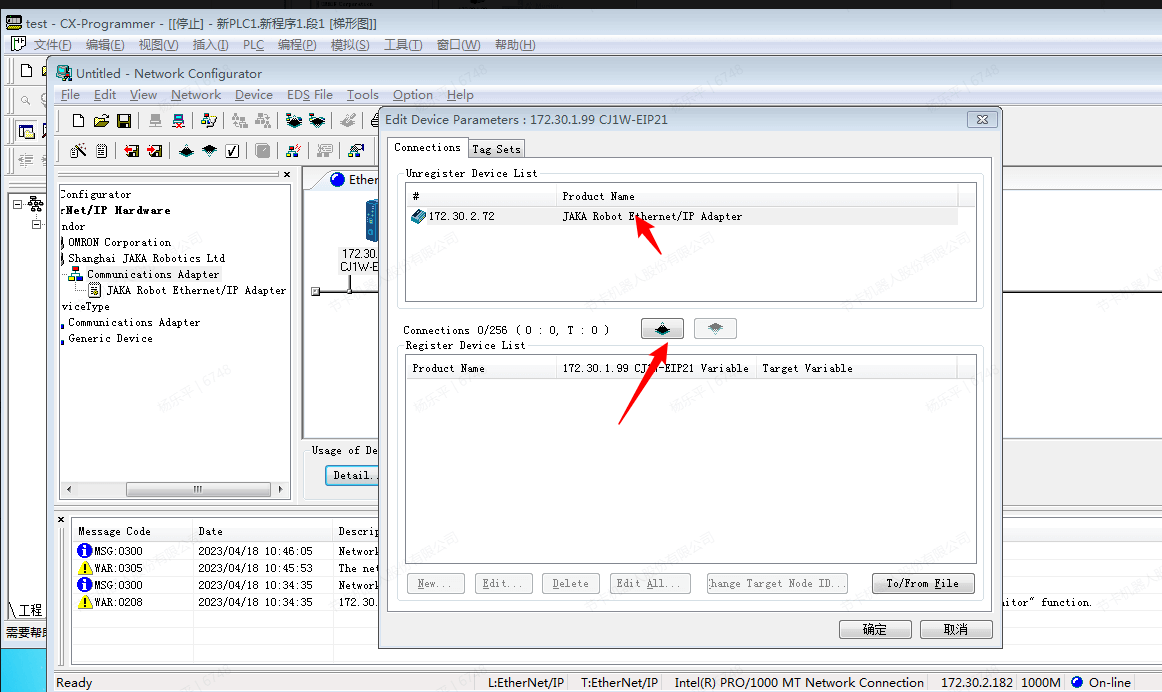
- 进行变量的设置
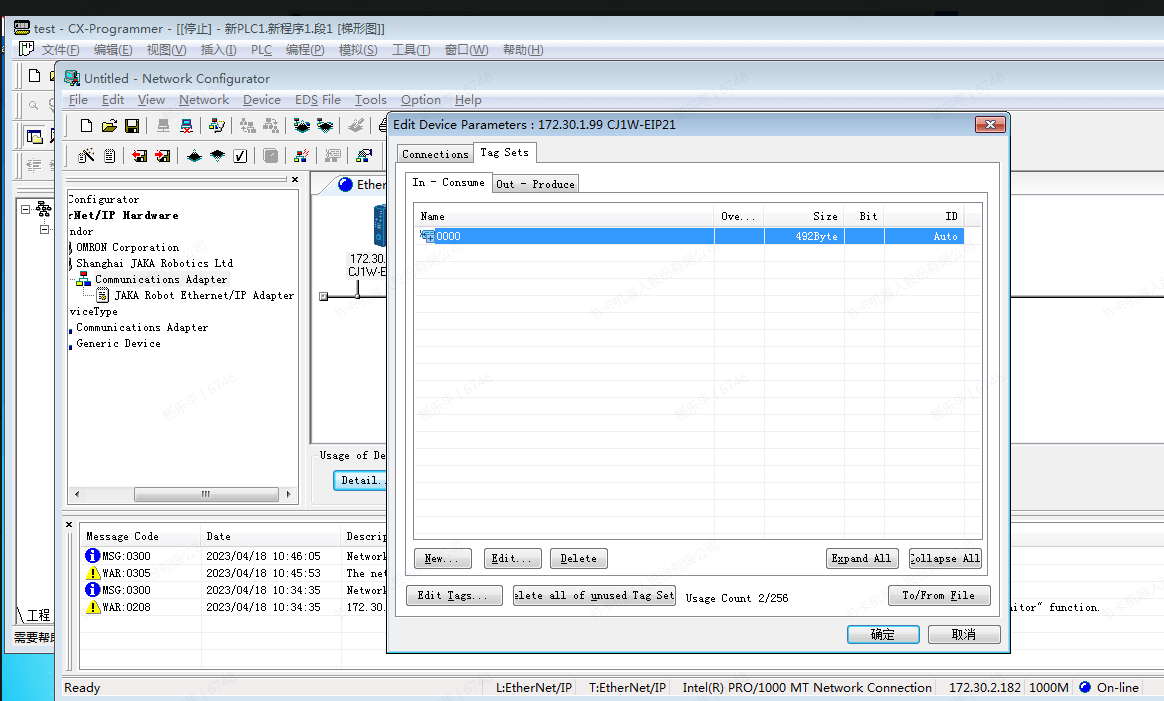
- 设置完成后将参数修改到PLC
- 点击“Dowland”
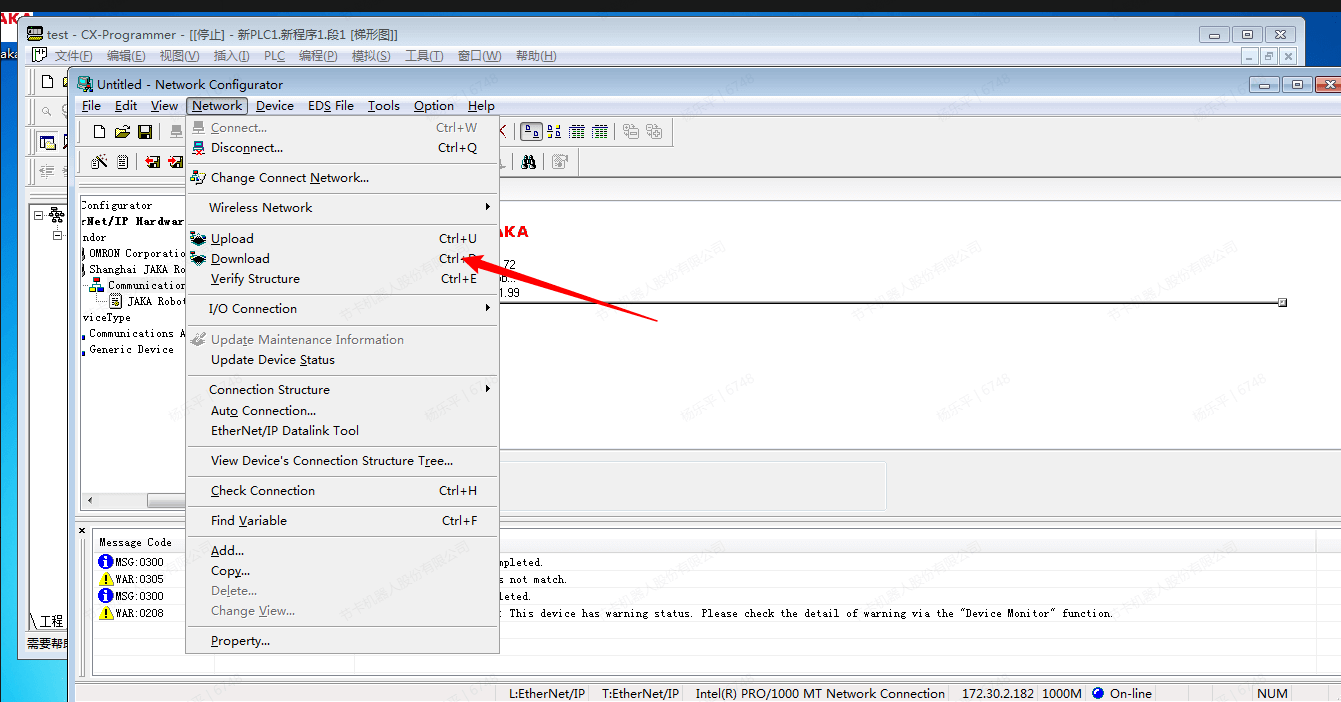
- 无视警告并继续
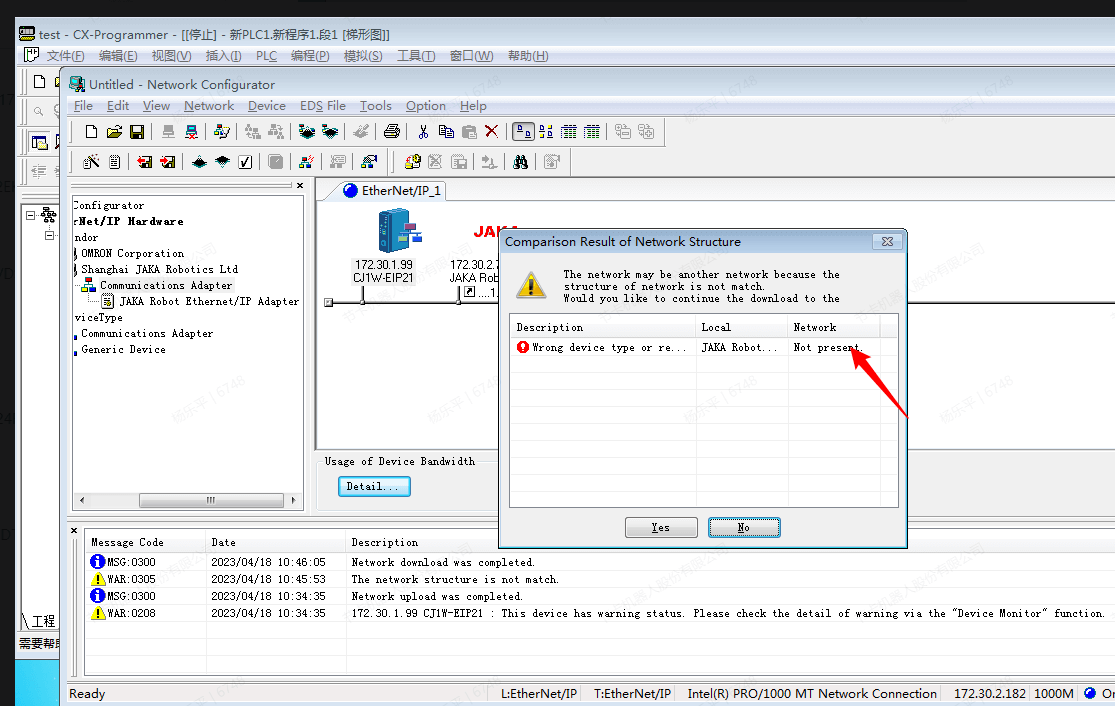
- 下载完成后将重启PLC
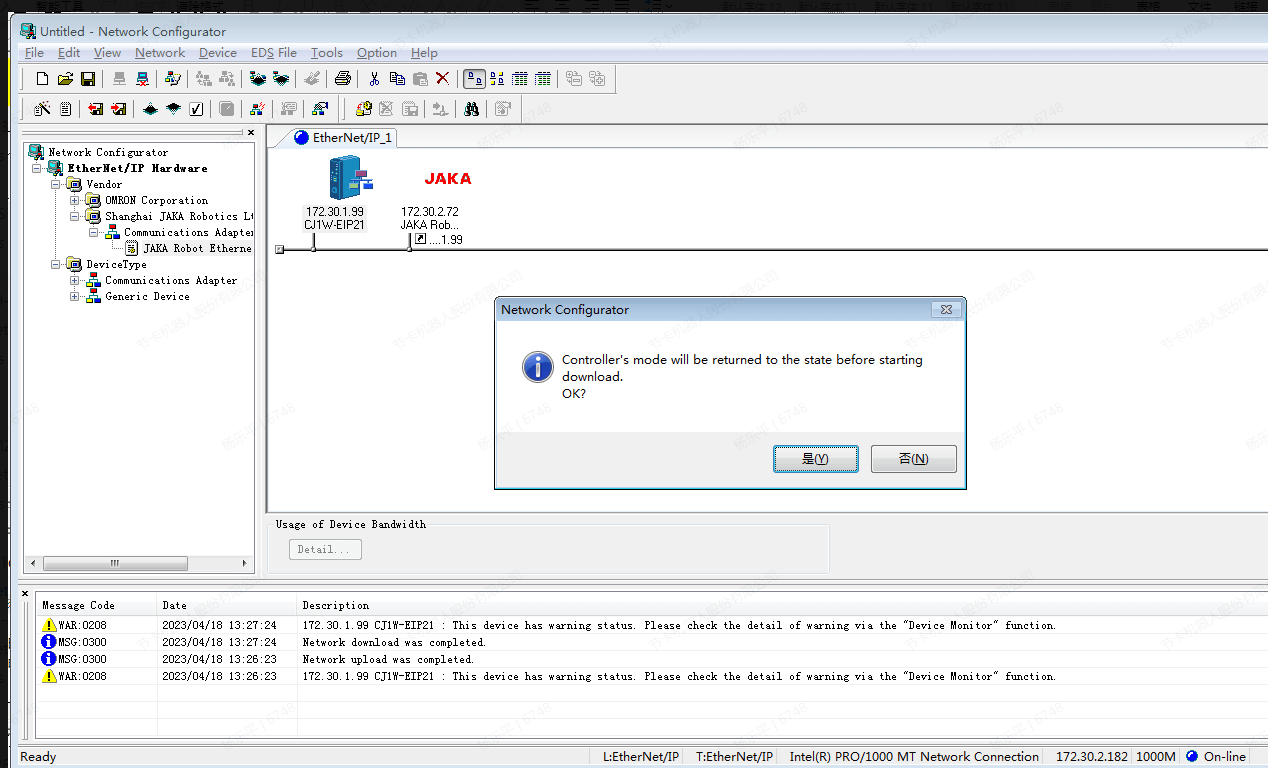
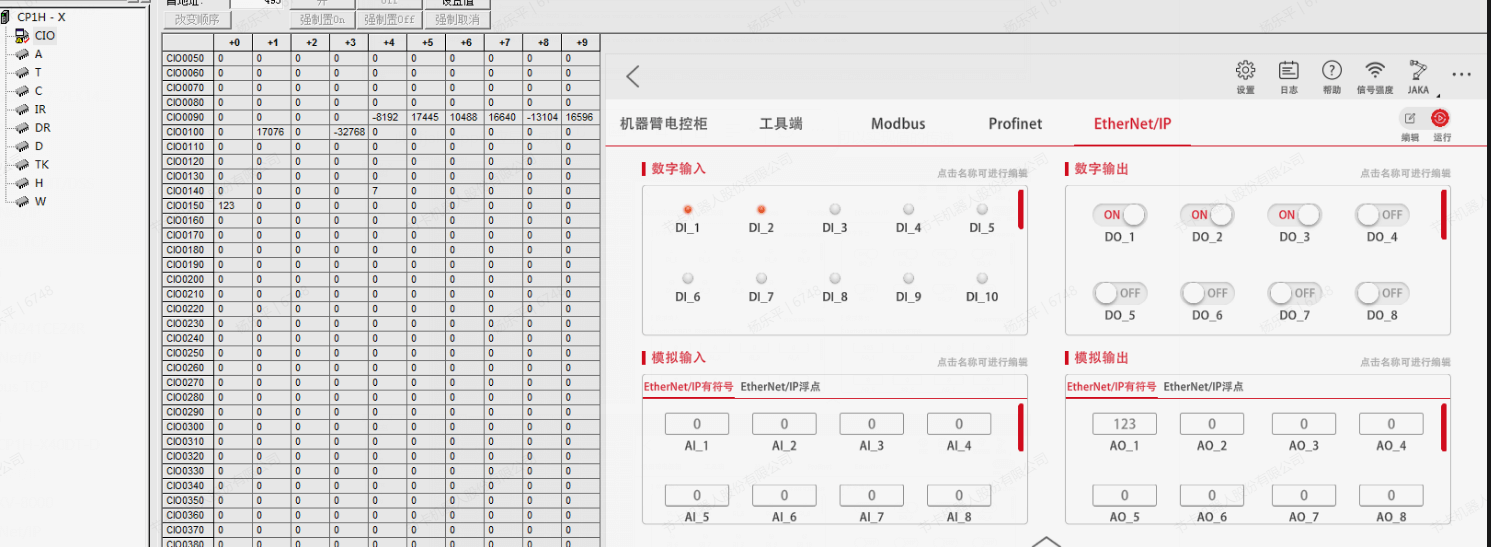
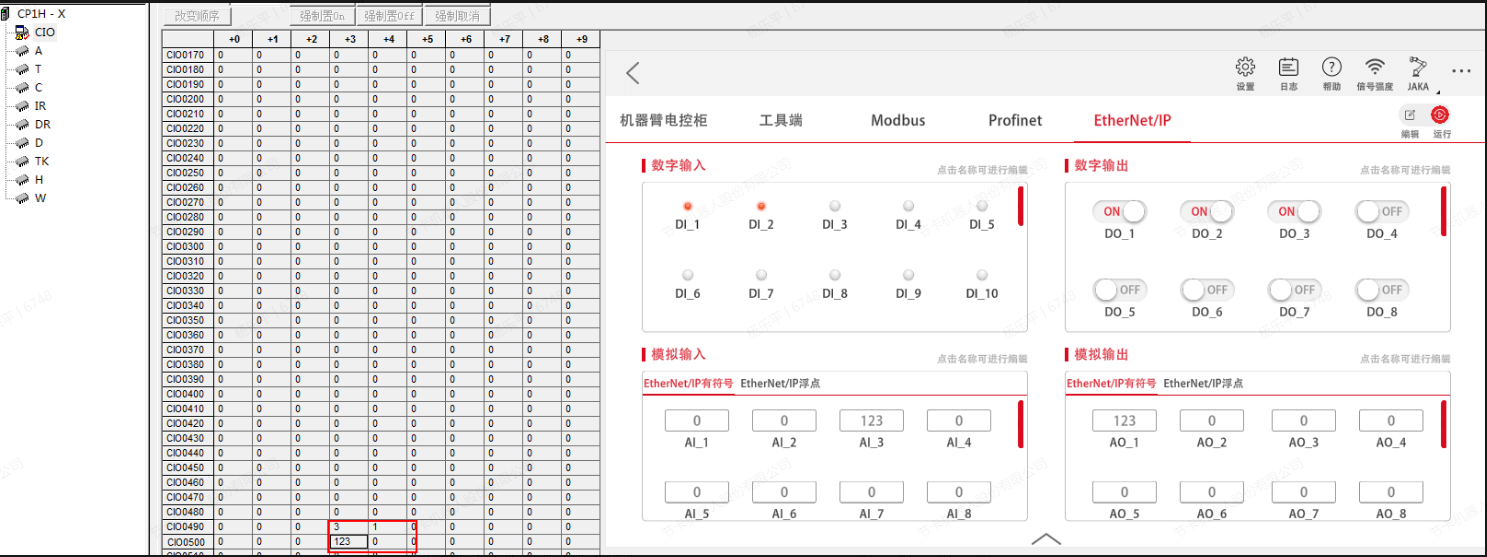
- 此时APP侧应显示成功连接主站,将PLC的工作模式切换为监视,可以实现值的传递
# 基恩士 KV-8000
所需软件:KV STUDIO,JAKA Zu APP
本例采用KV-8000作为CPU单元,KV-XLE02作为扩展单元
# EtherNet/IP
- 使用KV STUDIO新建工程,在初次使用以太网单元时,需要打开单元编辑器
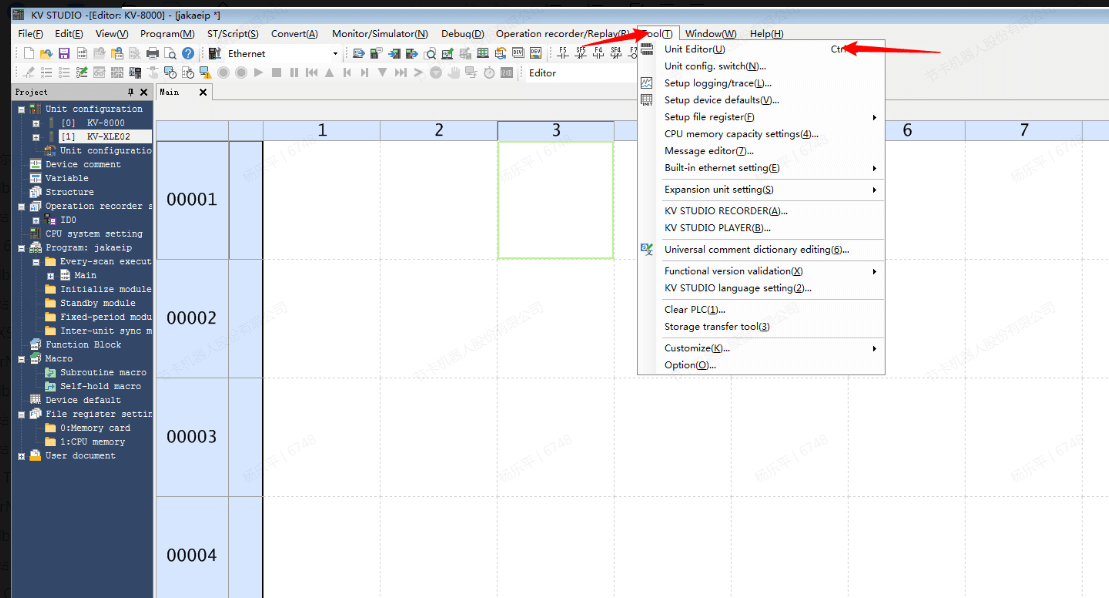
- 拖动单元到KV-8000上,如果已经连接CPU单元,也可以选择直接从PLC读取单元组态
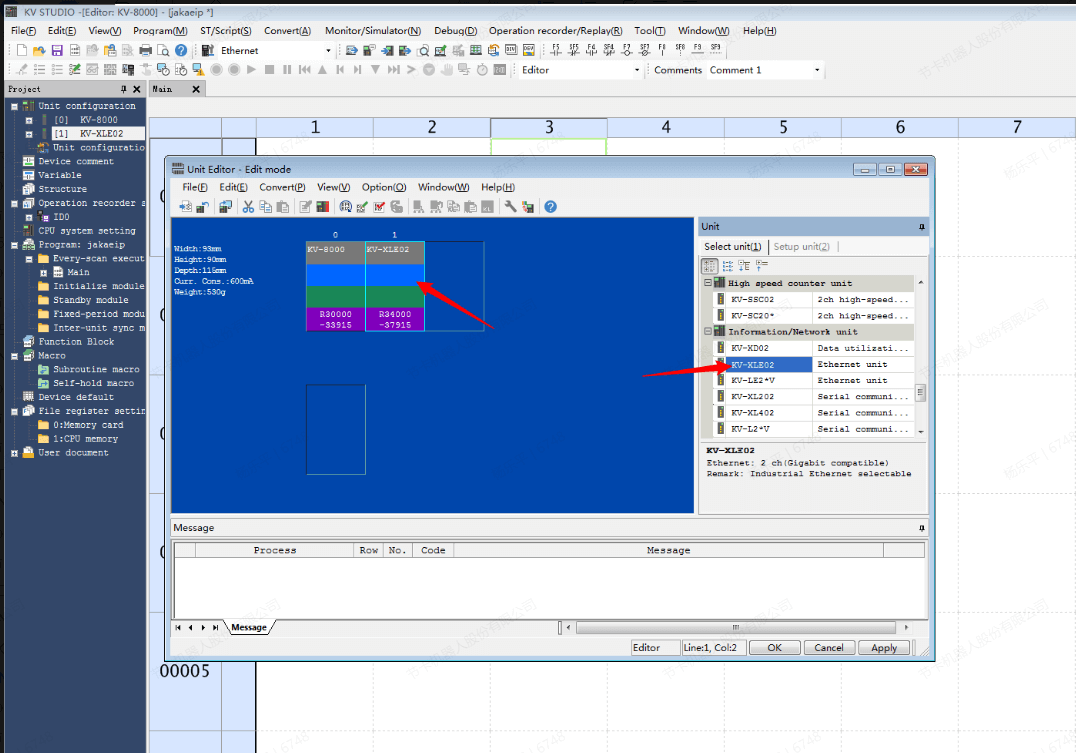
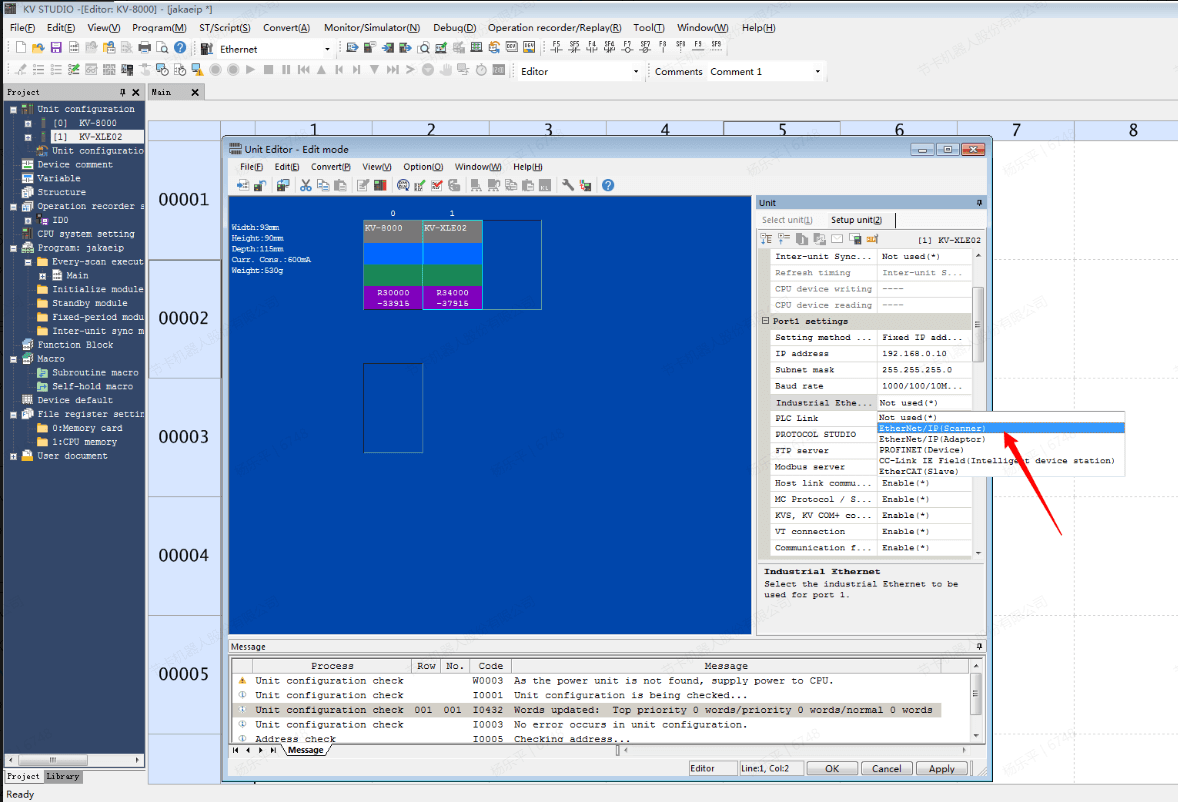
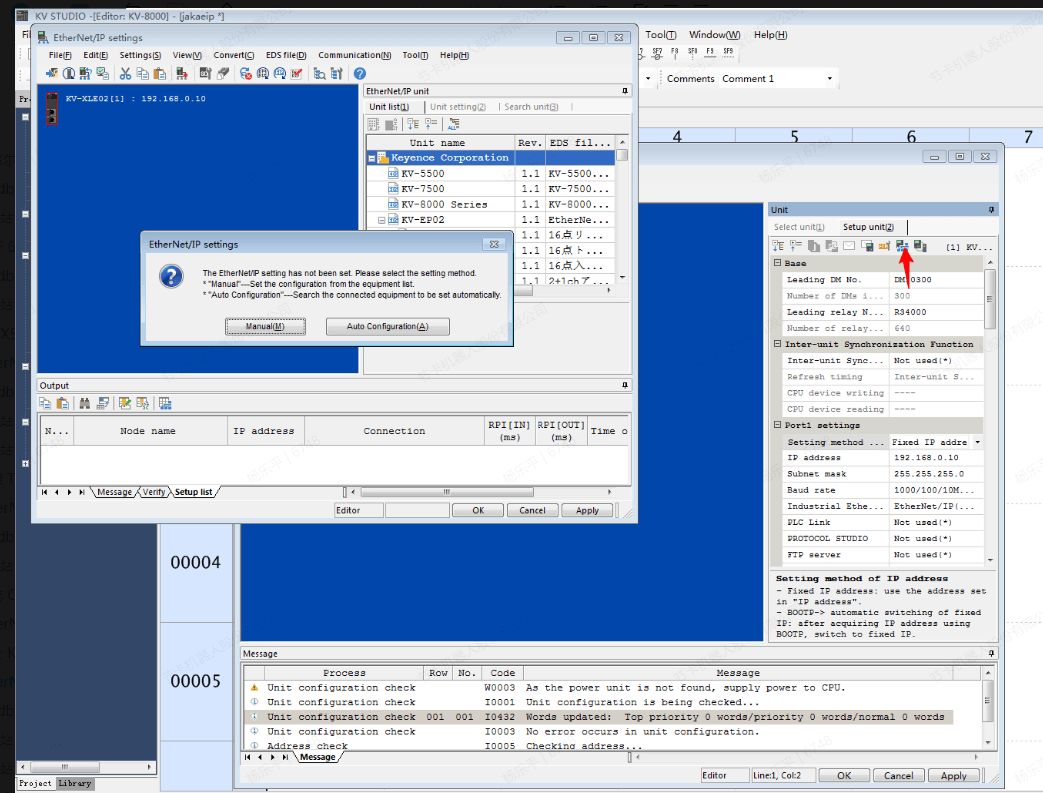
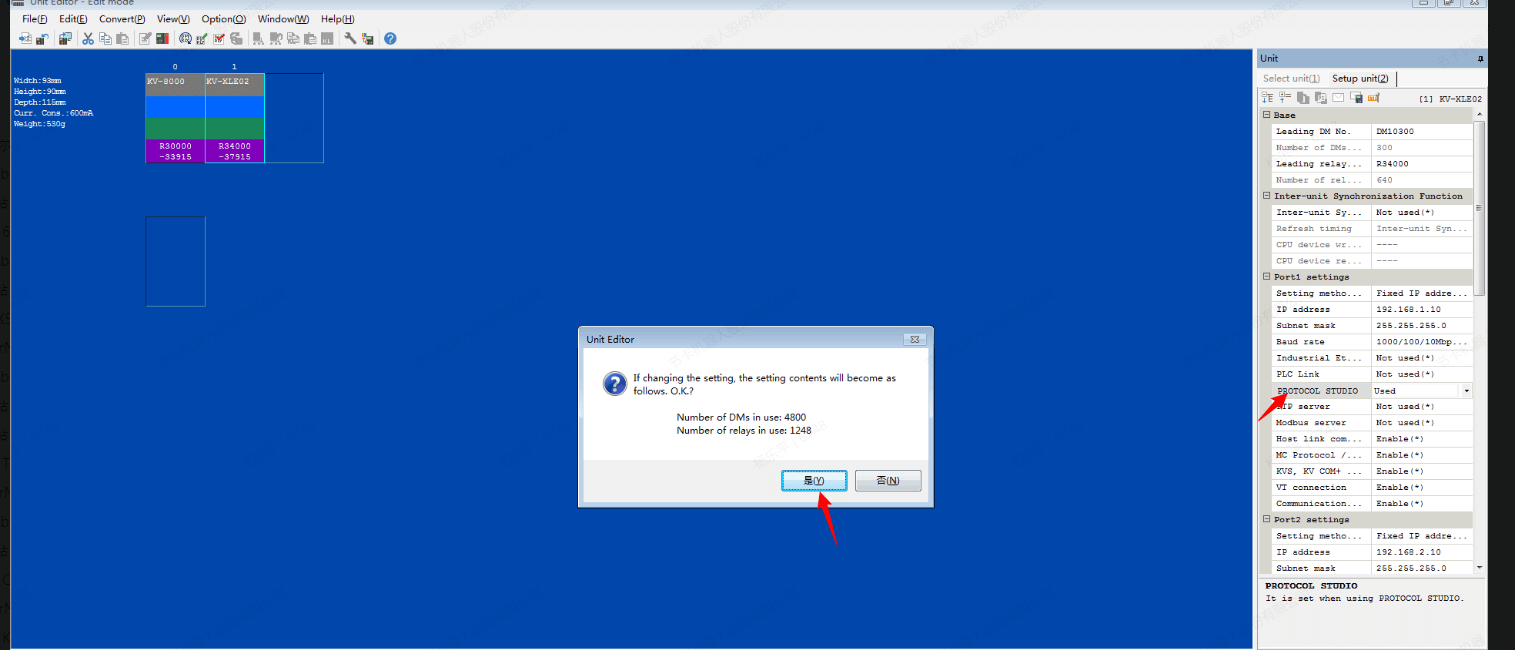
- 设置端口的协议为scanner,(此处如果不设置将不会显示EtherNet/IP设定),分别设置KV-8000和KV-XLE02的IP地址,最后应用设置。
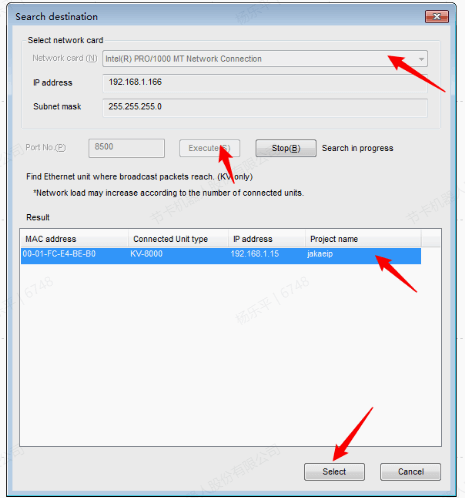
- 回到KV-STUDIO,选择监视器/模拟器的通信设定,选择EtherNet/IP或USB进行扫描,需要将PC与PLC使用网线或USB连接。选择EtherNet/IP进行扫描时,选择网卡并执行,可以扫描出对应的设备,扫描到设备后点击选择设备。
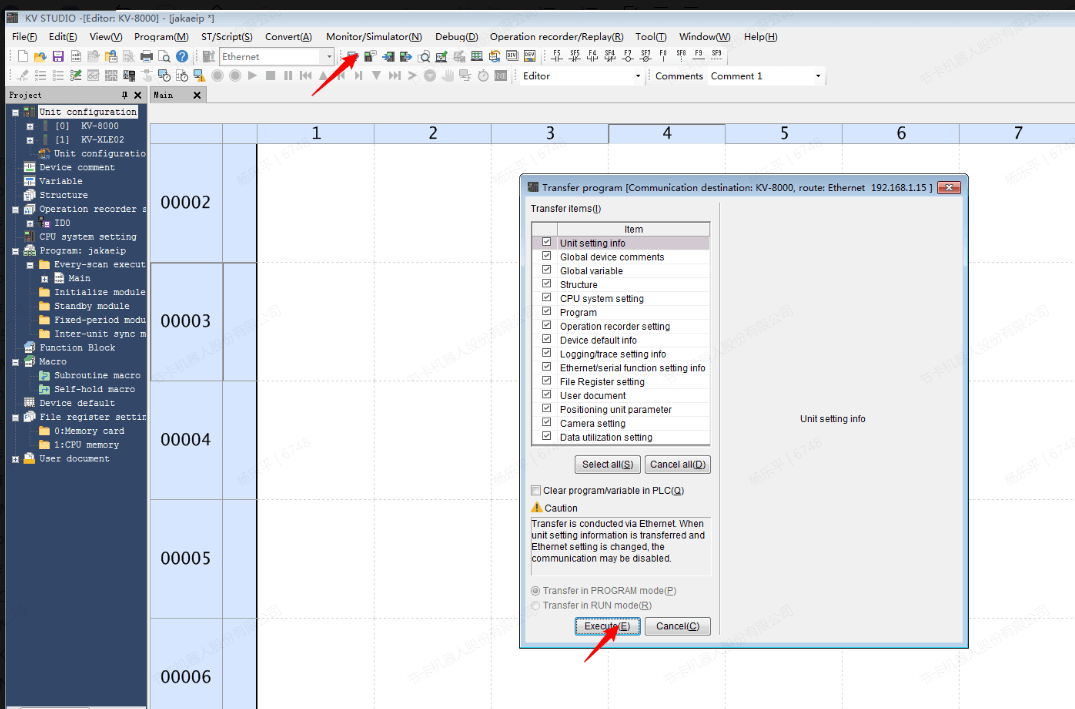
- 点击转换到PLC,选择执行,执行后会将单元编辑器内的以太网设定也一并写入PLC,如果在单元编辑器内修改了KV-8000的IP地址和KV-XLE02的通信协议,写入完成后设备的网络参数也会发生改变。另外KV-XLE02的两个端口的网络部须保持不同。
- 导入JAKA的eds文件
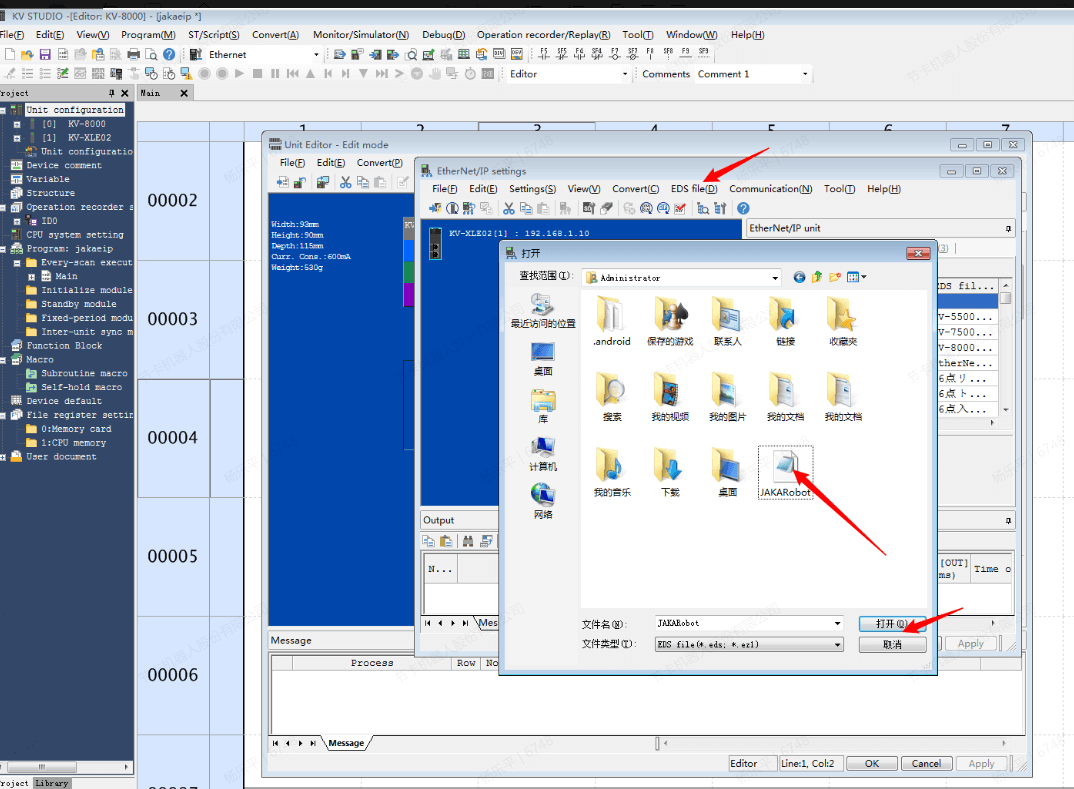
- 本例将port 1的IP地址设置为192.168.1.10,重复上述选择设备的步骤,将网线接入KV-XLE02,选择此设备,回到单元编辑器,点击EtherNet/IP设定
- 将JAKA设备的IP地址设置为与PLC同一网段,本例中为192.168.1.20/24,点击自动设定,将自动扫描网络拓扑
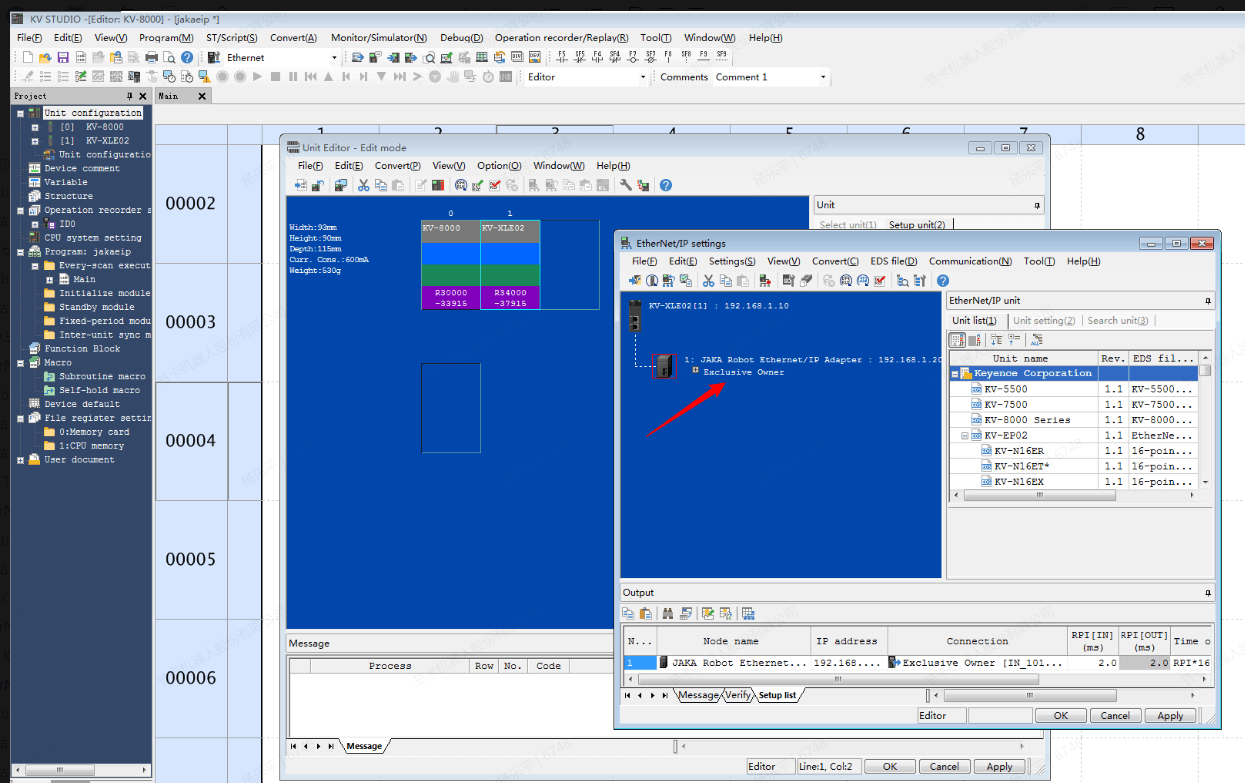
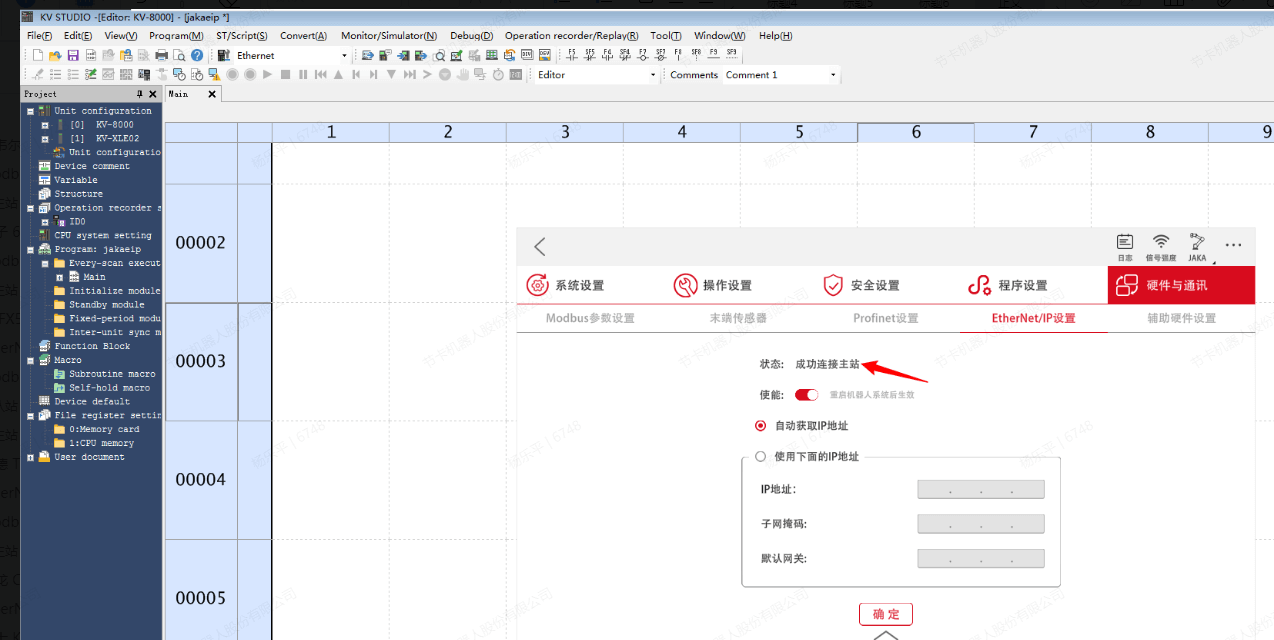
- 回到KV STUDIO,将EtherNet/IP设定和单元编辑器下载到PLC,此时APP测应显示成功连接主站。
- 回到单元编辑器的EtherNet/IP设定,点击Exclusive Owner的Edit,可以选择自动分配软元件或手动分配,此处选择自动。基恩士定义的EtherNet/IP设备的通信数据的数据类型为位和字,数据的显示方式根据类型变化。针对非基恩士的设备,使用自动分配,选择字设备
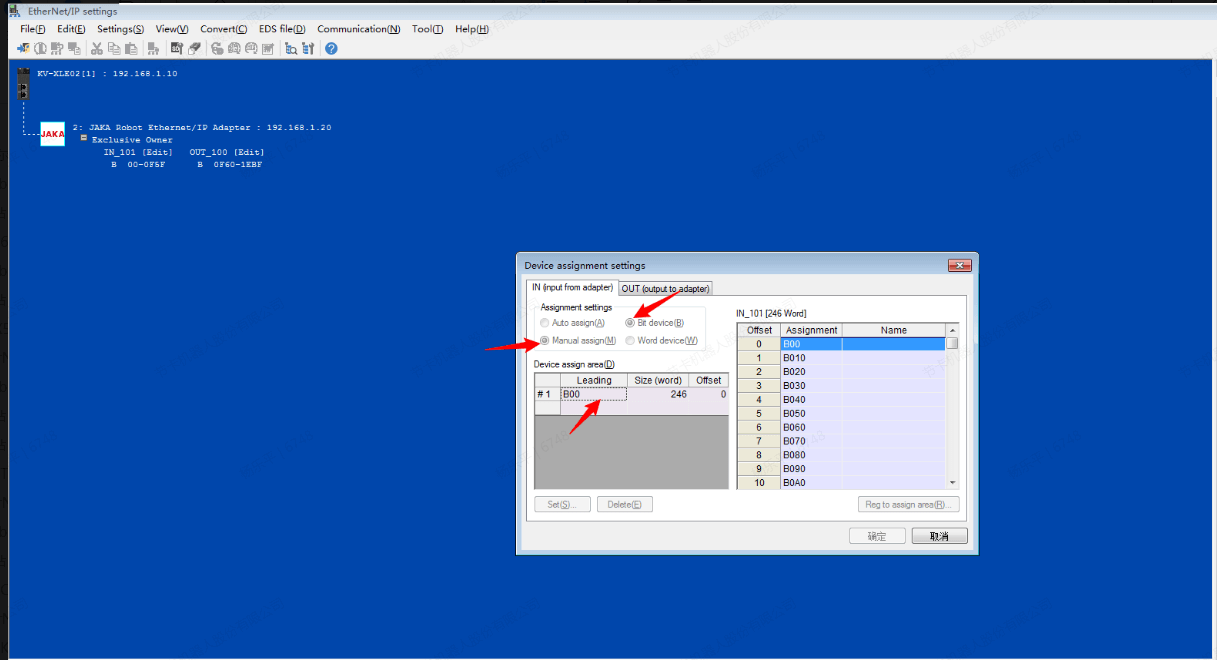
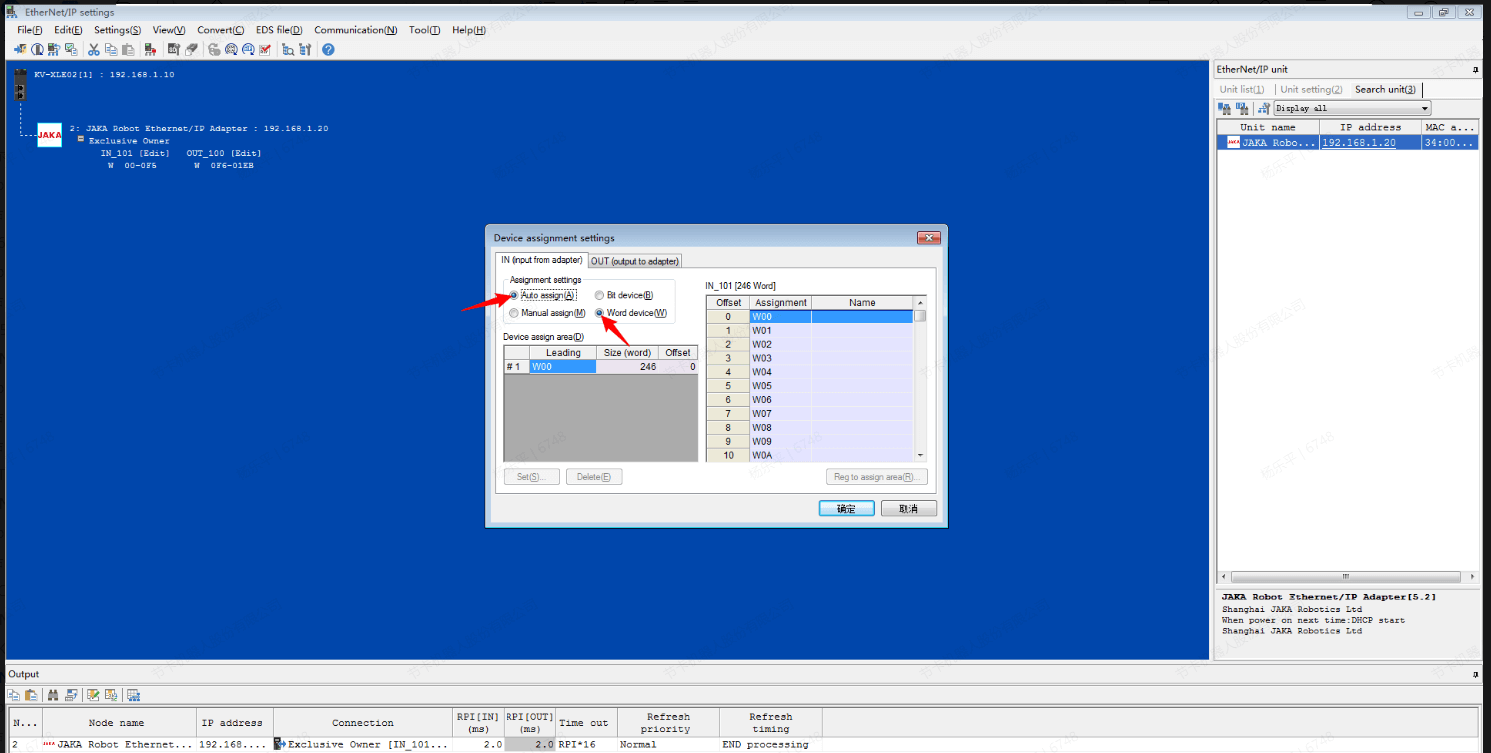
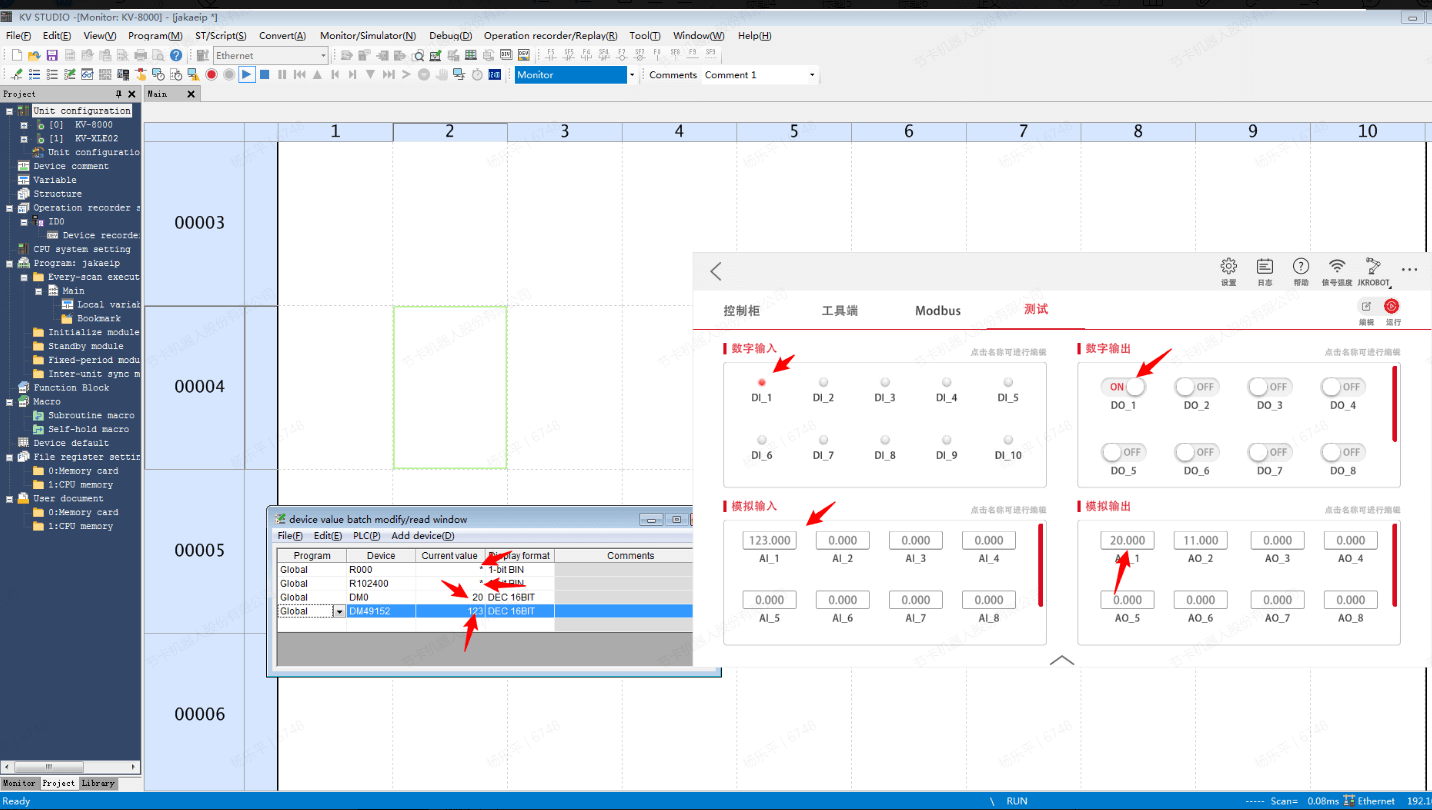
- 保存设置,由于JAKA的数据默认占32位,而KV-STUDIO的数据类型默认为WORD,占16位,当使用WORD的数据类型时,JAKA的DI对应到PLC从IN_101[144]开始,DO从OUT_100[0]开始,打开监视窗口
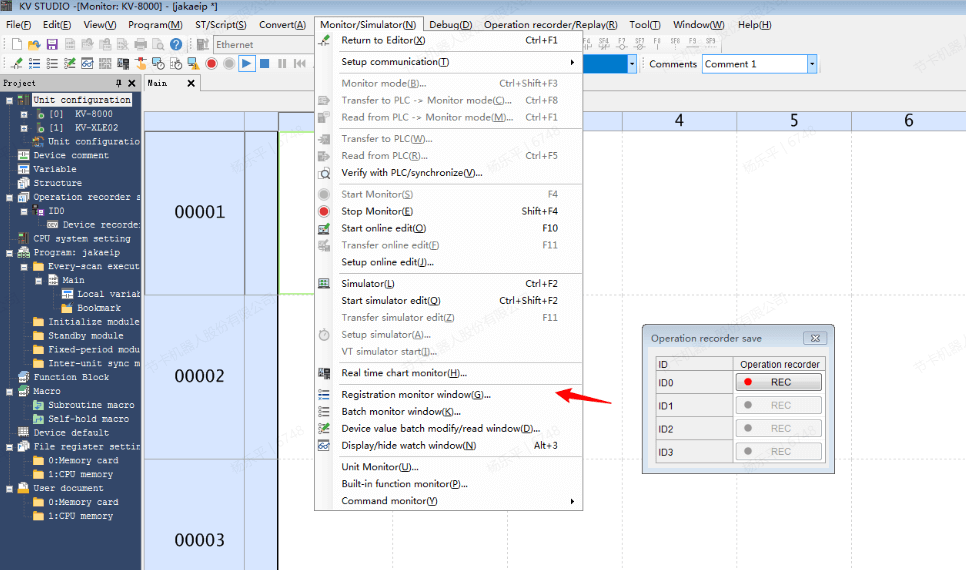
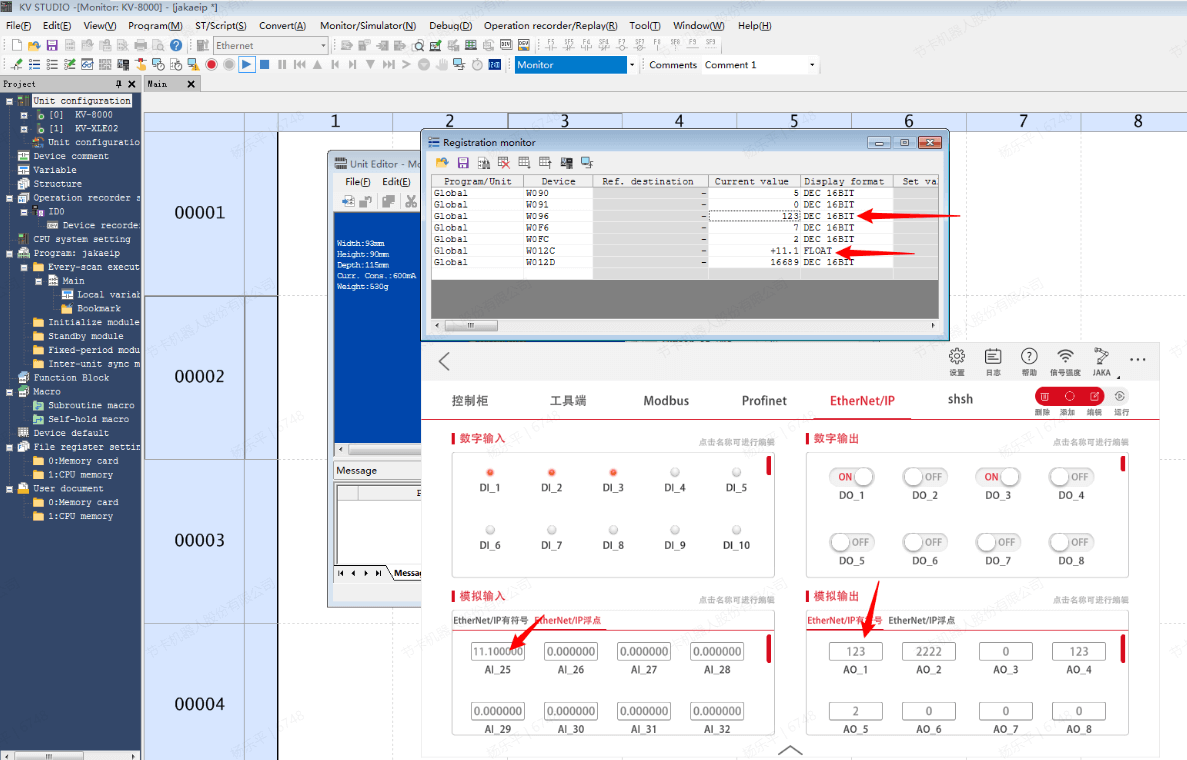
- 在APP和KV STUDIO修改参数,查看各软元件和APP的值,由于KV STUDIO默认的数据类型为WORD,因此使用时需要进行高低位的拼接处理。
# Modbus TCP
# 从站
- KV-XLE02作为从站时不需要发送接收用的梯形图程序,进入单元编辑器打开PROTOCOL STUDIO开关
- 在单元设置中对Modbus的所有相关参数进行配置,如IP地址、modbus TCP端口号、线圈和寄存器地址等。默认值中,只读软元件(输入/输入寄存器)被设定为与可读写软元件(线圈/保持寄存器)相同的分配。
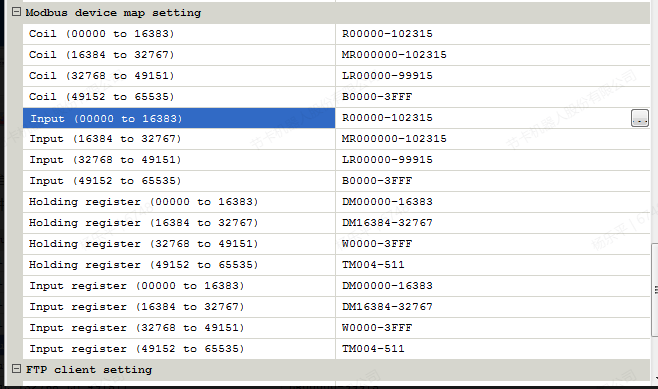
- 将单元编辑器的配置写入PLC,启动监视模式,此时从站成功开启,选择从站的寄存器地址进行监视,需要注意的是,默认情况下KV-XLE02的只读软元件(输入/输入寄存器)被设定为与可读写软元件(线圈/保持寄存器)相同的分配,可以按照需求自行分配。此处为了区分做了一定区别。

- 打开JAKA扩展IO,点击运行,修改参数后再KV STUDIO读取和发送对应地址的参数,可以看到参数的同步更新
# 台达 AS228T-A
所需软件:Delta ISPSoft,HWCONFIG,JAKA Zu APP
# EtherNet/IP
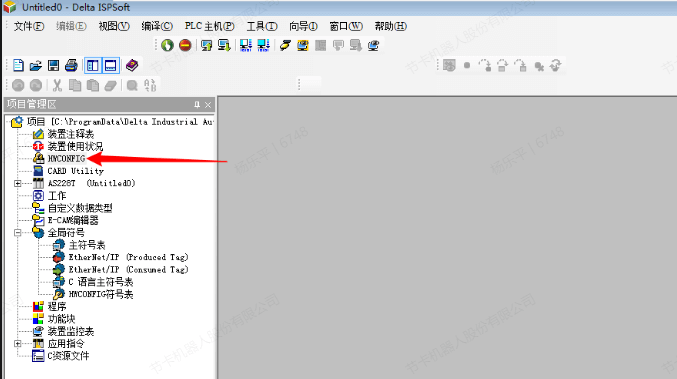
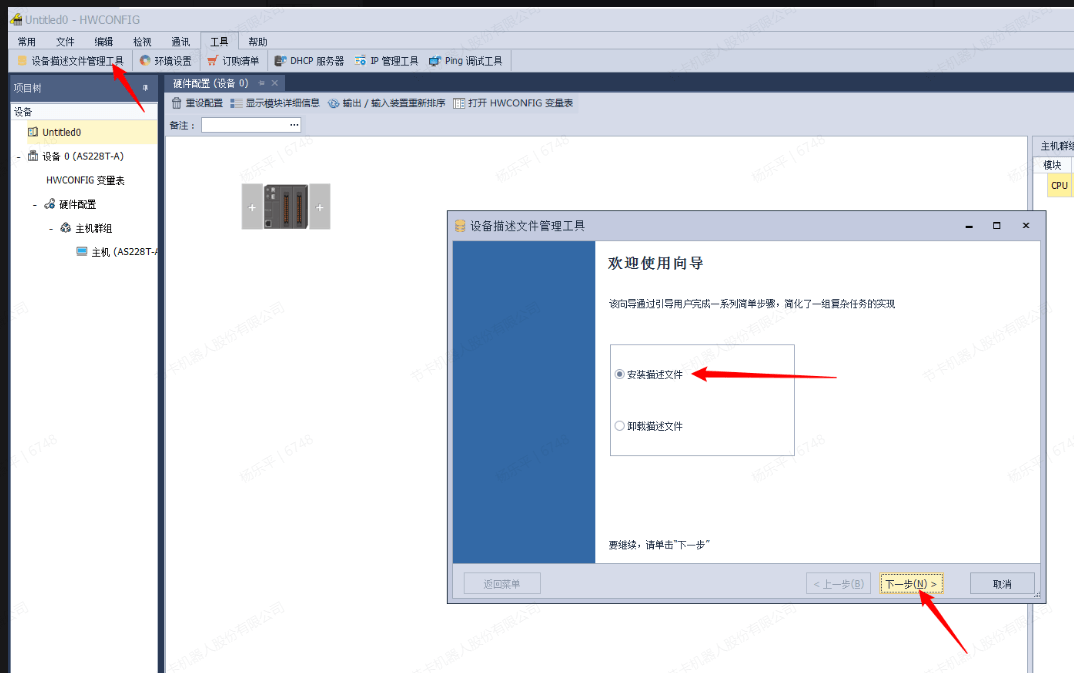
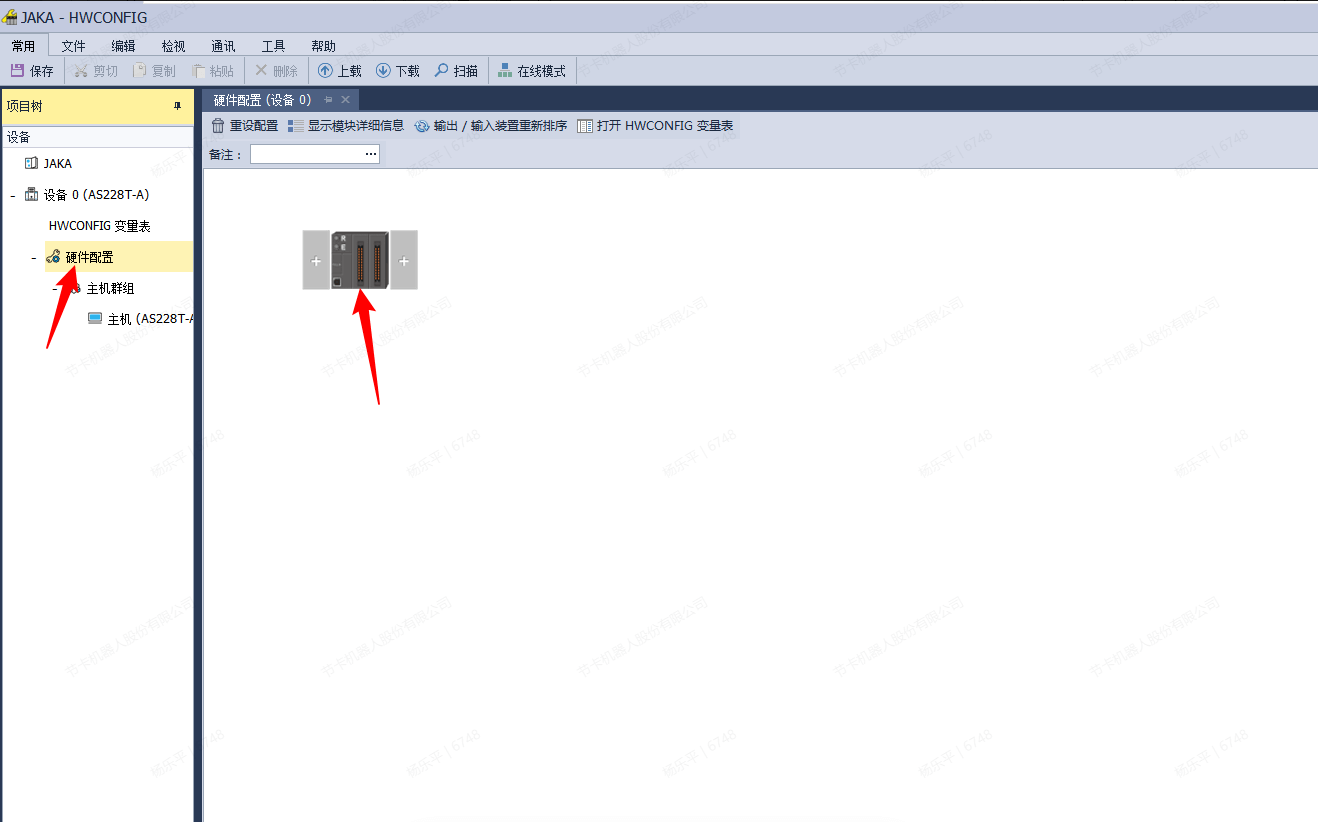
针对台达的AS系列,需要从HWCONFIG打开EIP BUILDER,否则没有AS系列的选项,如果是更新的版本,可以直接在HWCONFIG完成EIP的配置和网络拓扑
新建工程,双击HWCONFIG
- 安装设备描述文件管理工具
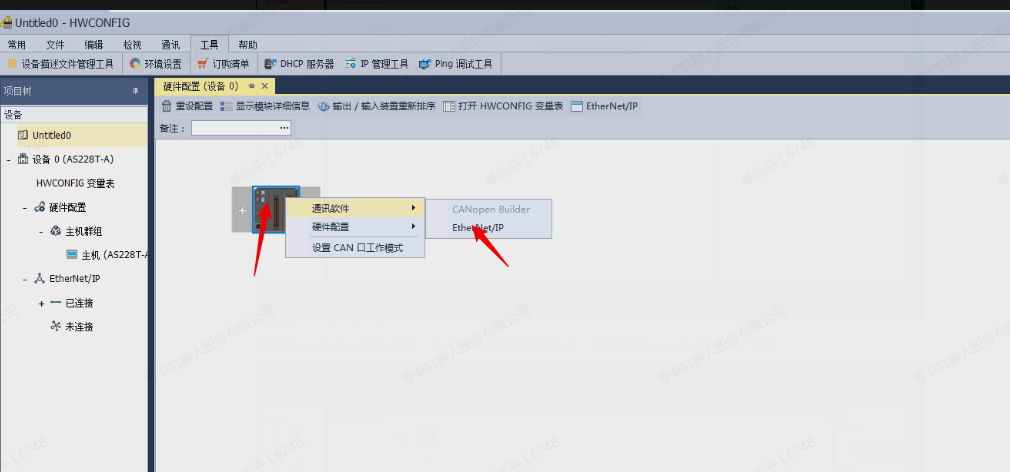
- 右键单击PLC设备,选择通讯软件的EtherNet/IP
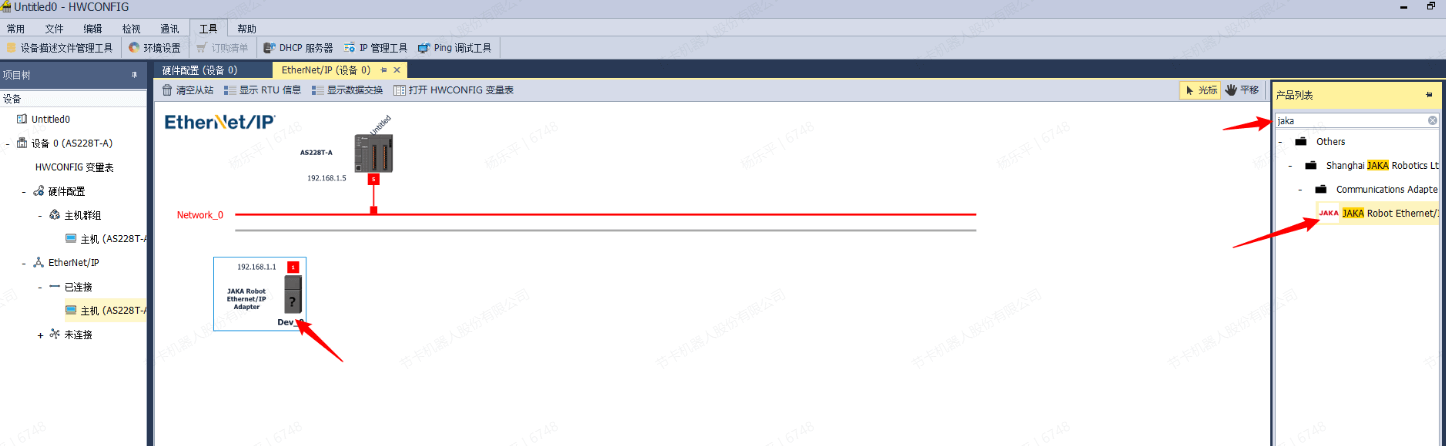
- 搜索导入的jaka描述信息,将其拖拽到组态网络内,然后双击jaka设备修改IP地址
- 点击快速连线,将设备连接在同一网络内,然后下载到设备
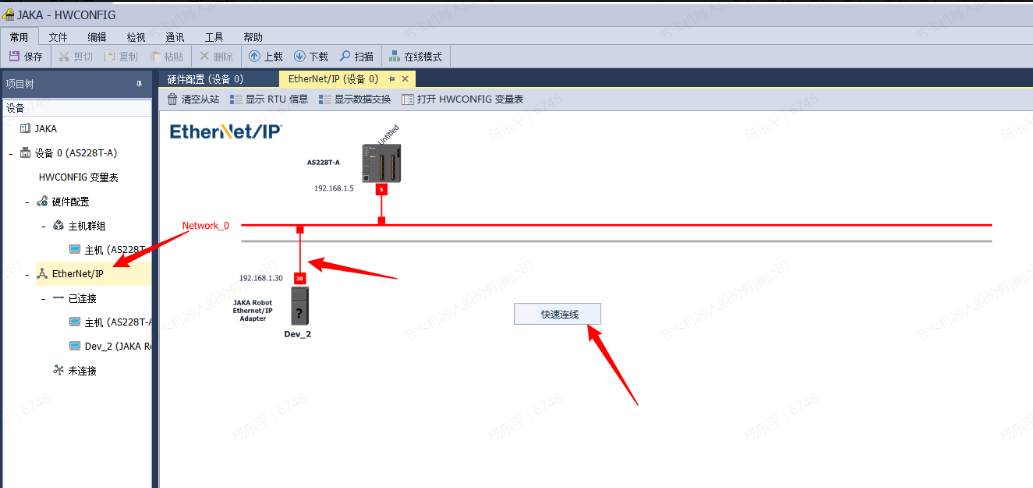
- 点击显示数据交换,设置主站寄存器地址,最后将相关数据下载到PLC
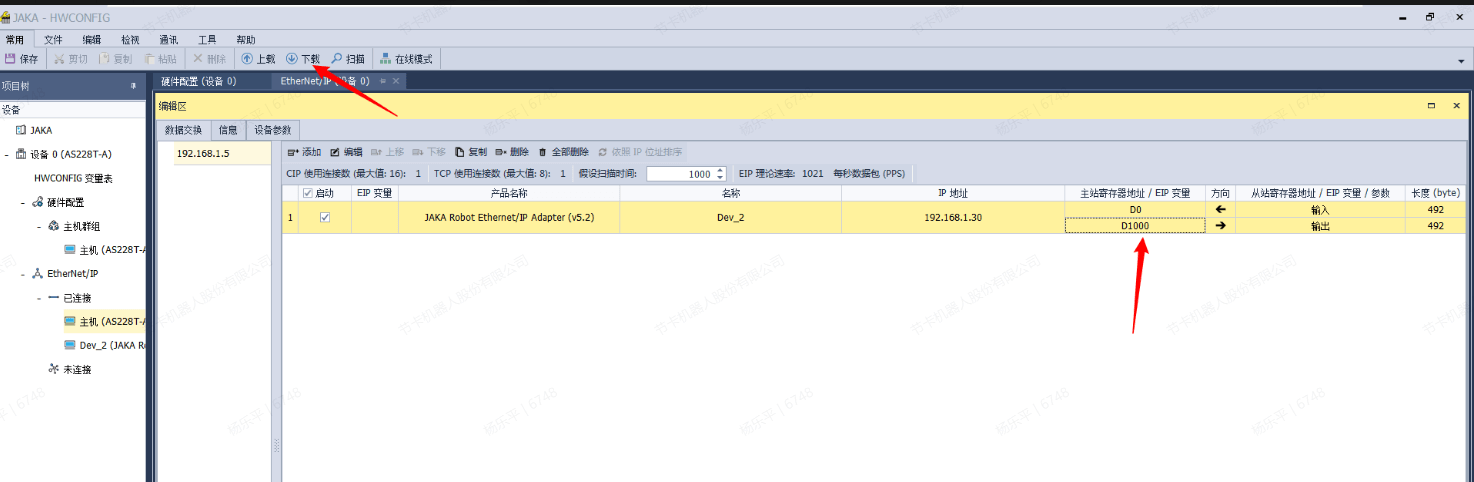
- 下载完成后应显示成功连接主站
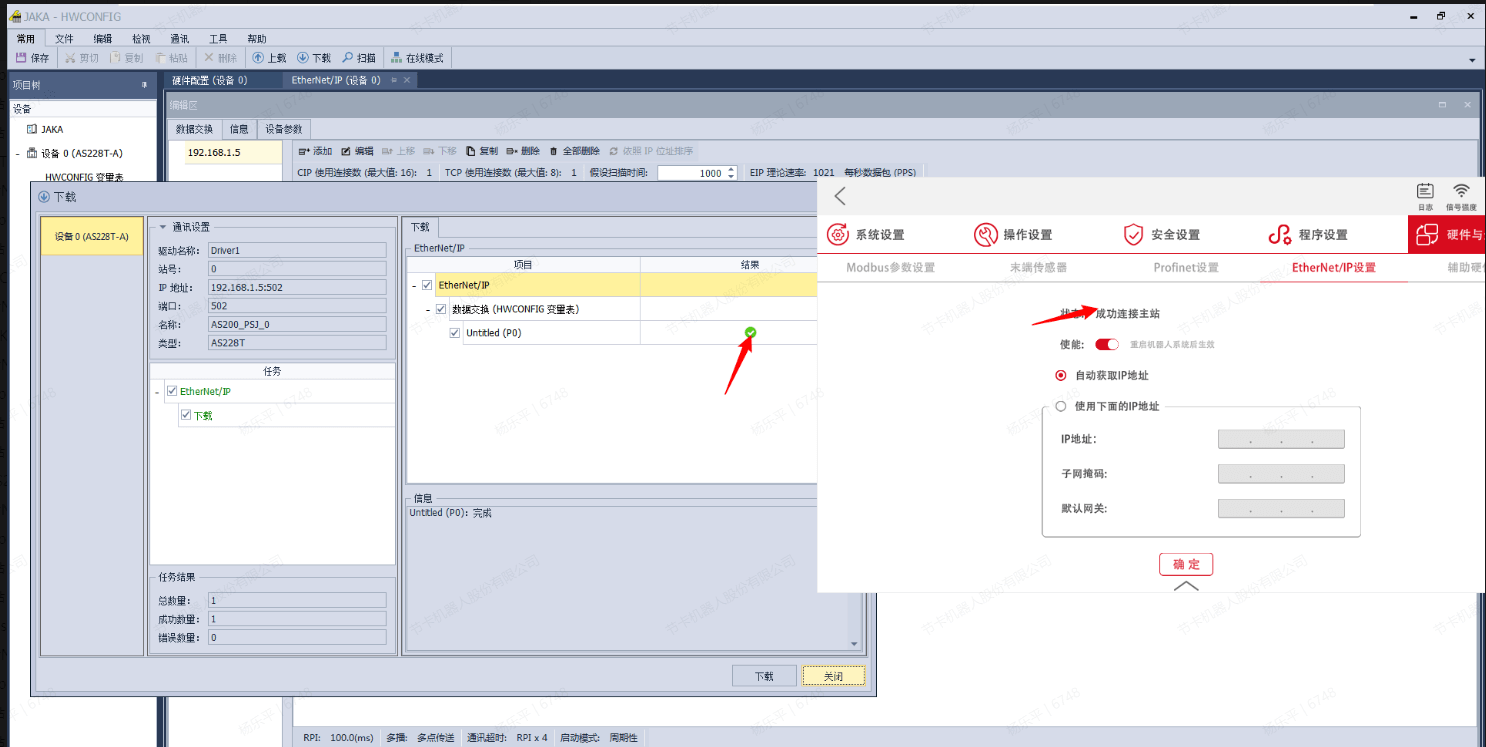
- 关闭并保存HWCONFIG,回到ISPSoft,点击联机模式,弹出项目比对不符,点击是执行下载
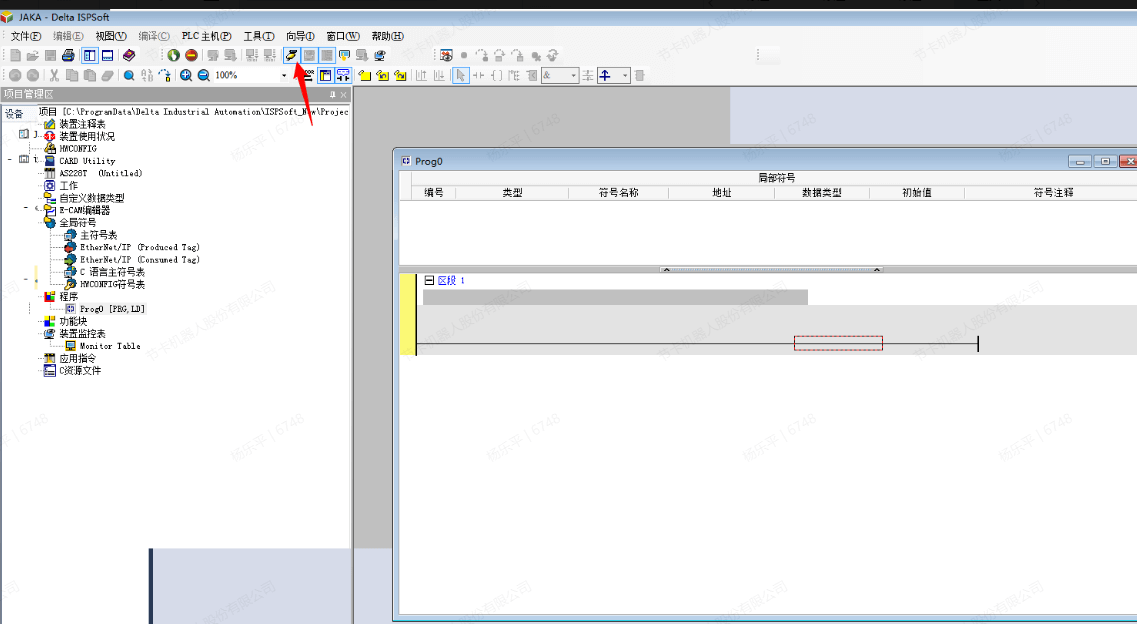
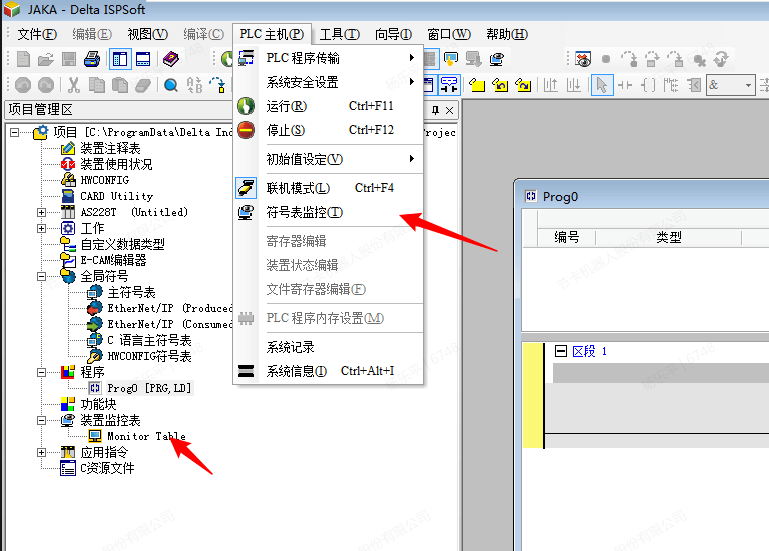
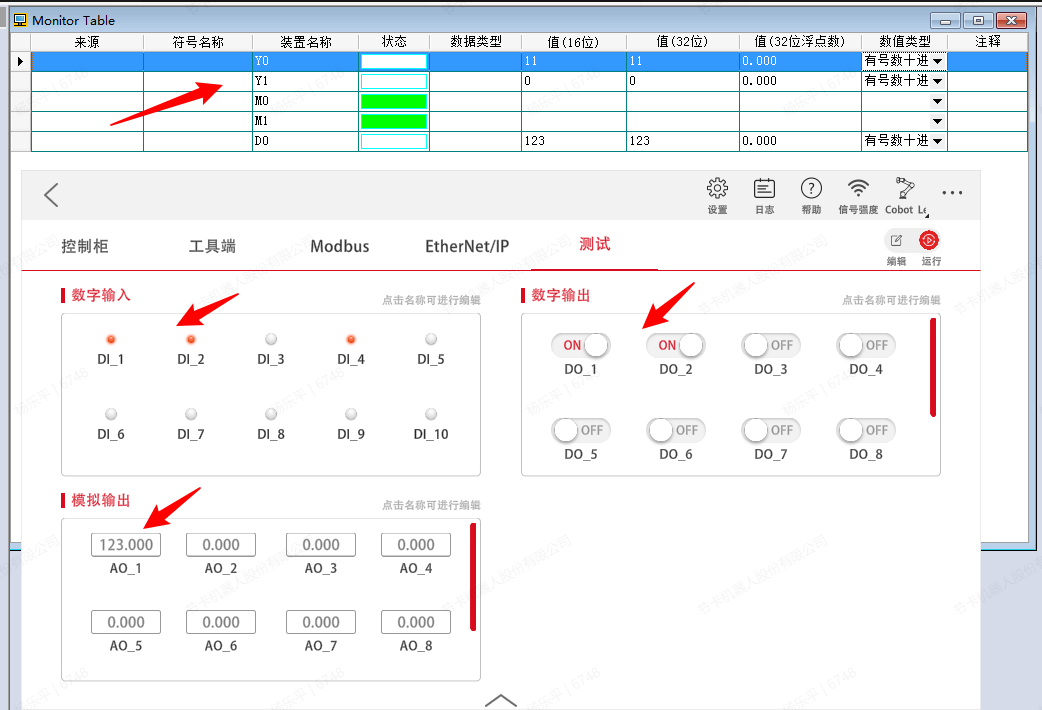
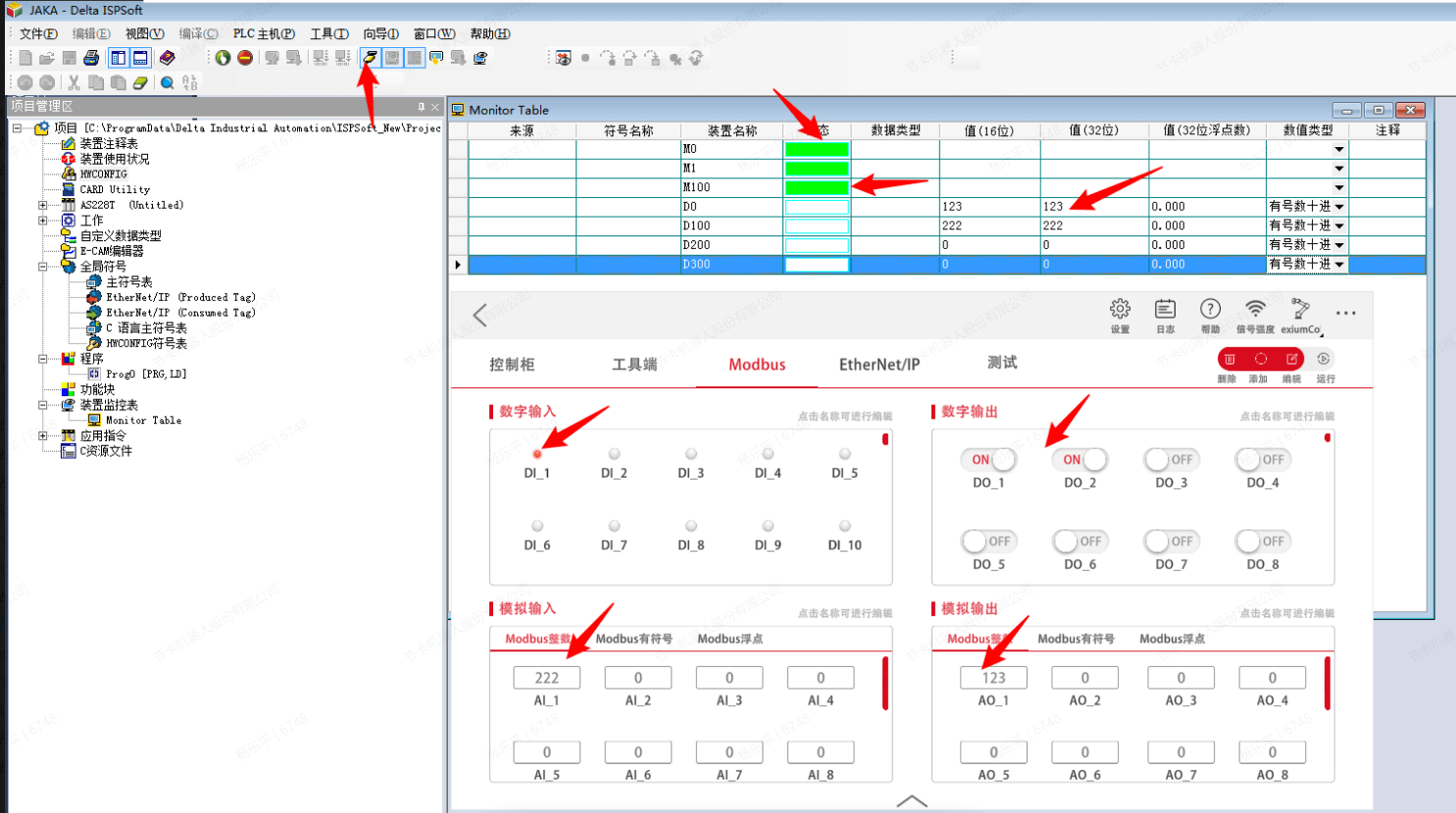
- 点击装置监控表,新建监控表,新建地址变量
- 监视DO和AO的变化,浮点数同理
- 监视DI和AI的值,根据设定,DI的值从D1000开始,浮点数同理
# Modbus TCP
# 从站
- 官网可以找到设备标准MODBUS的地址,可以直接访问这些地址来实现对台达PLC Modbus从站的访问,端口号默认为502,其中MODBUS位址的第一位代表访问的寄存器类型
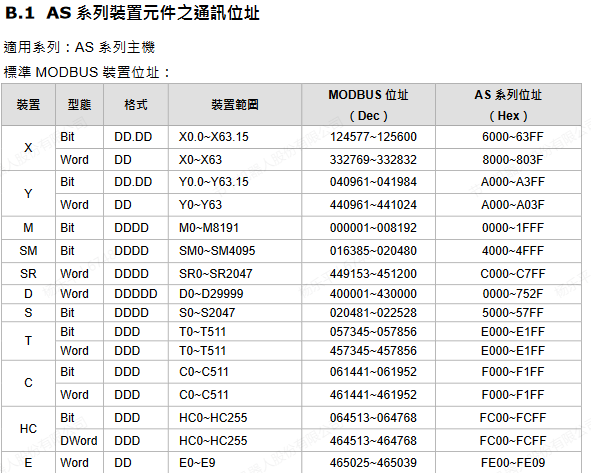
- 在装置监控表监控数据,以对Y、M、D的访问为例
# 主站
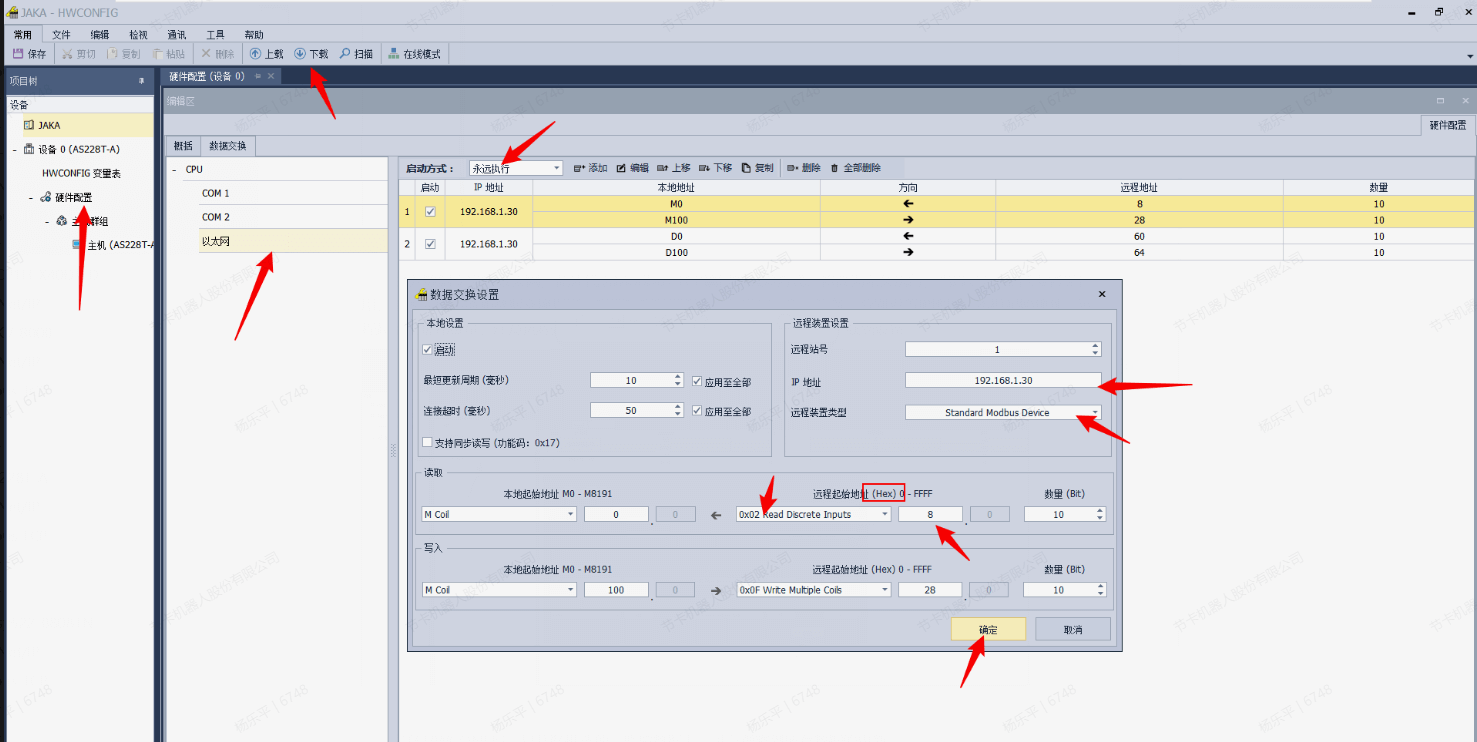
- 双击进入HWCONFIG,双击硬件配置,双击设备图标
- 进入数据交换的以太网,此处代表Modbus TCP端口的触发方式,修改为永久执行,当PLC上电时会始终启用,修改完成后添加数据交换规则,设置远程装置类型为标准Modbus设备,分别设置IP地址、本机起始地址、远程起始地址和数量,注意远程起始地址使用十六进制,设置完成后将参数下载到设备
- 关闭HWCONFIG,打开联机选项,监控数据表,可以观察到所有数据的更新
- 由于JAKA Modbus从站对浮点数采用的是大端显示,因此高位字节被存储在地位字节,按照台达PLC的显示规则为
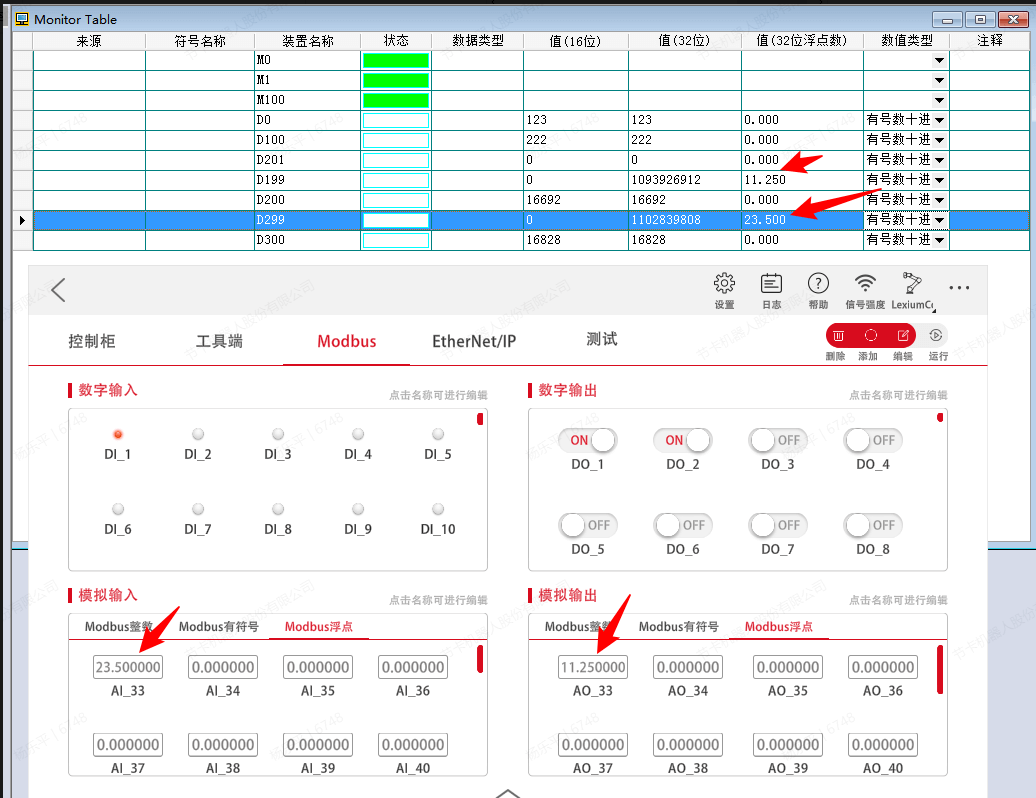
# 汇川 Easy522‑0808TN
所需软件:AutoShop,JAKA Zu APP
# EtherNet/IP
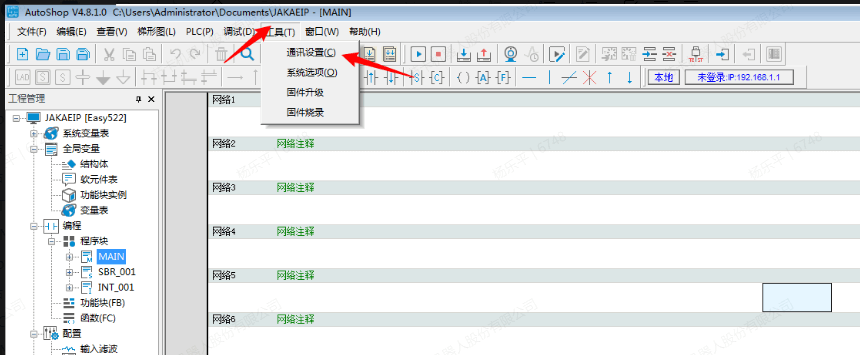
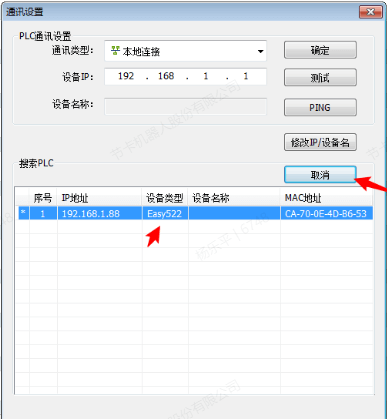
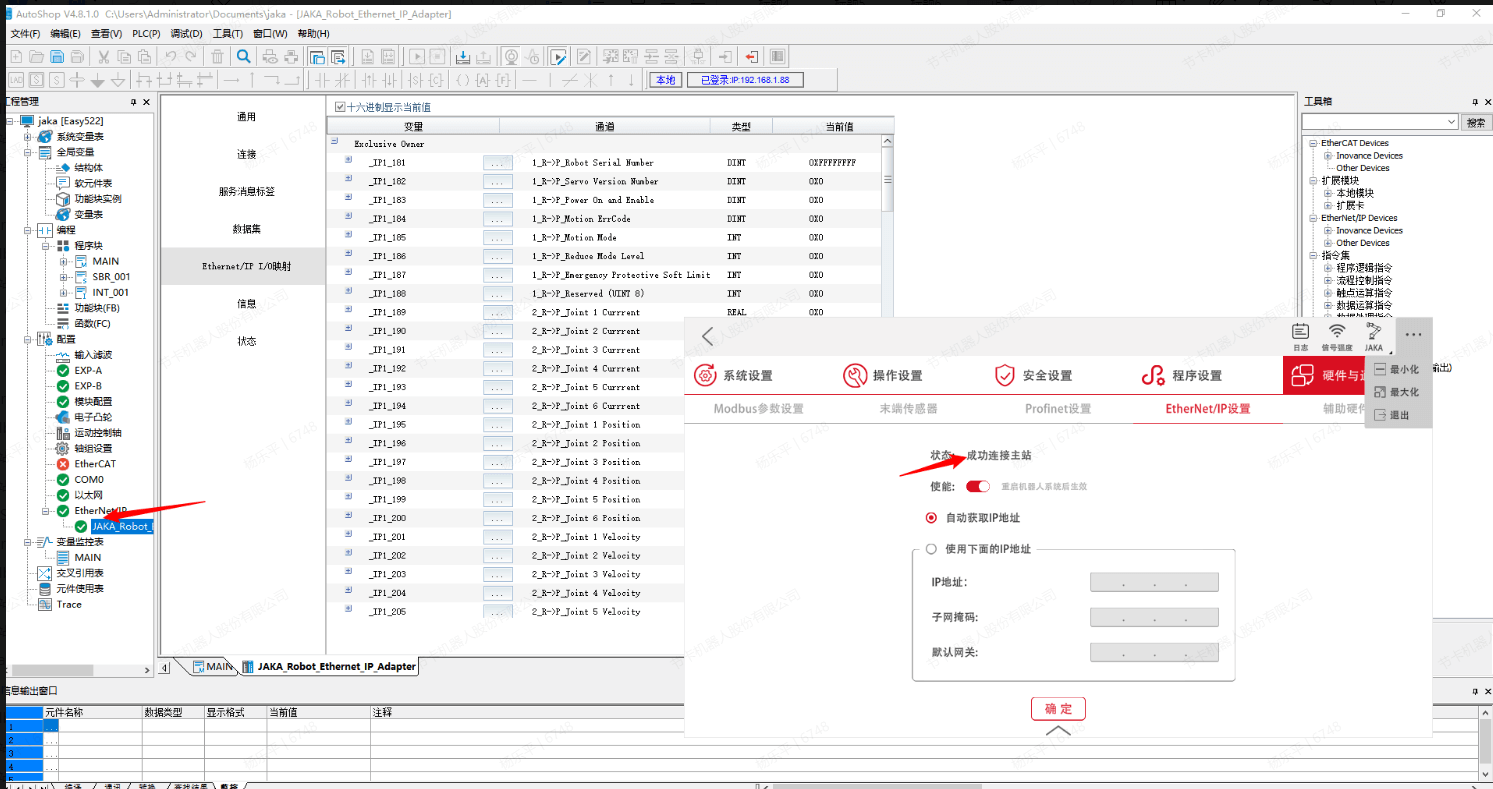
- 打开AutoShop,新建工程,选择PLC型号,进入工具的通讯设置
- 点击搜索设备
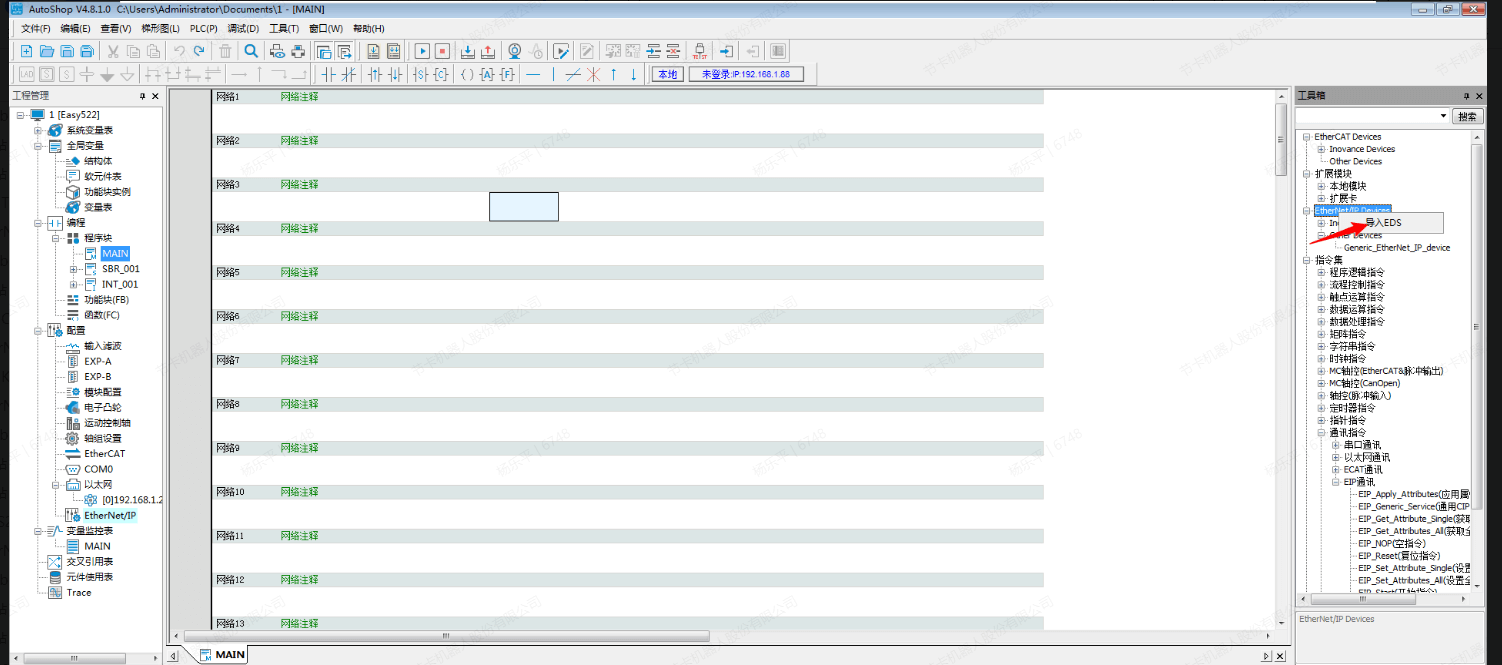
- 选择导入eds文件
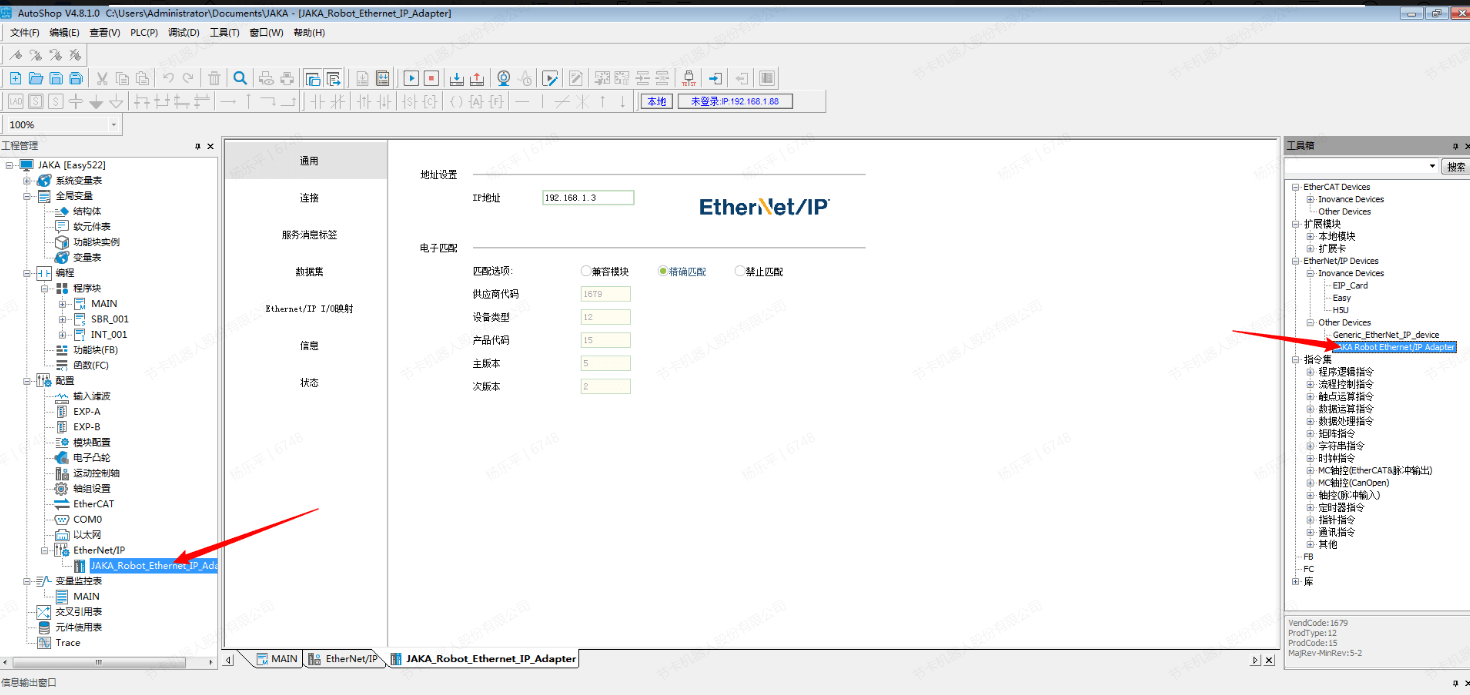
- 导入成功后双击设备添加组态
- 编译后下载到设备,并将设备切换到运行状态
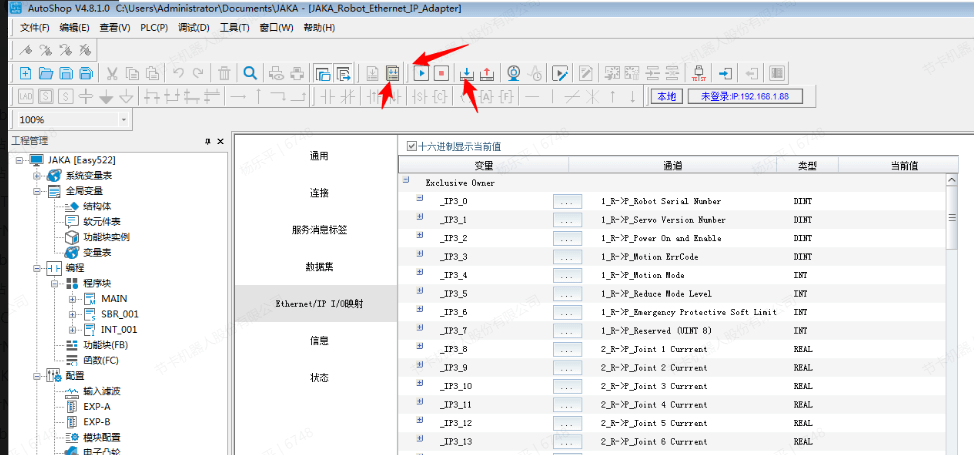
- 此时设备应显示成功连接主站,并且配置中的EtherNet/IP显示的都是绿色
- 使用数字输出和有符号输出,可以正常更新到PLC
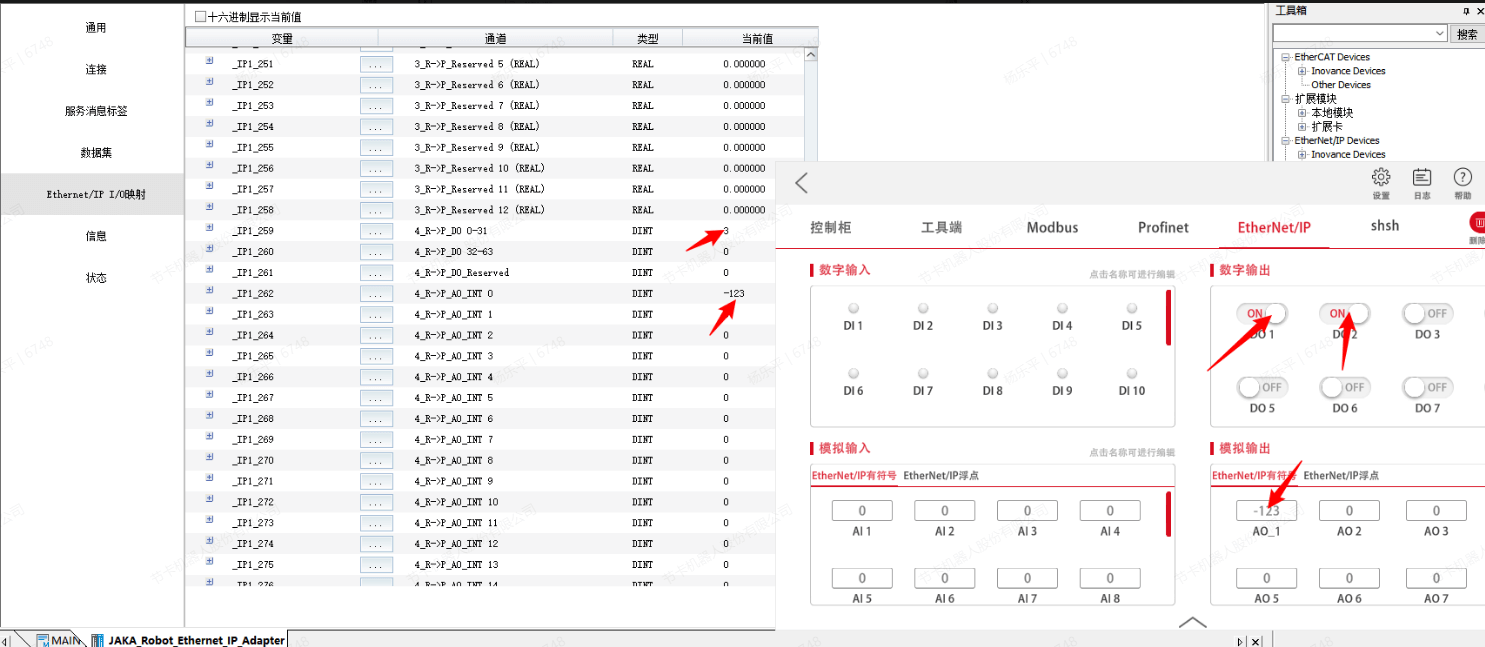
- 浮点数也可以正常更新
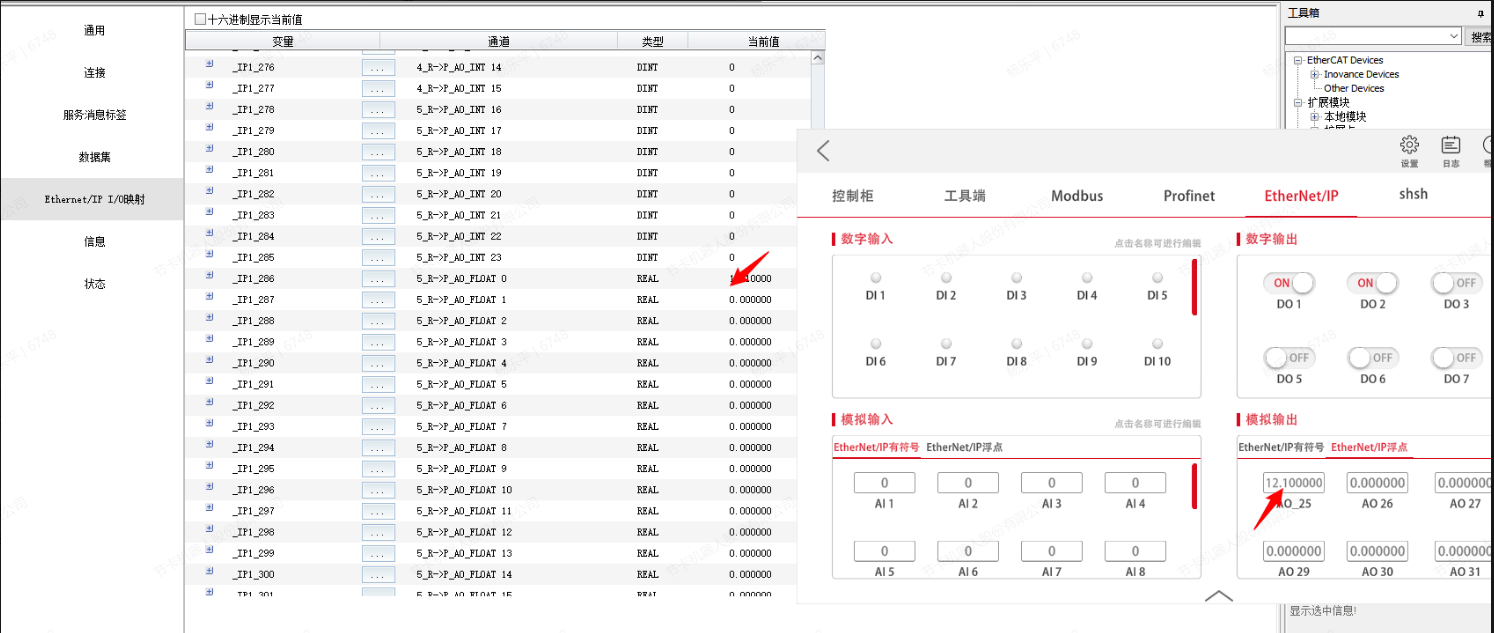
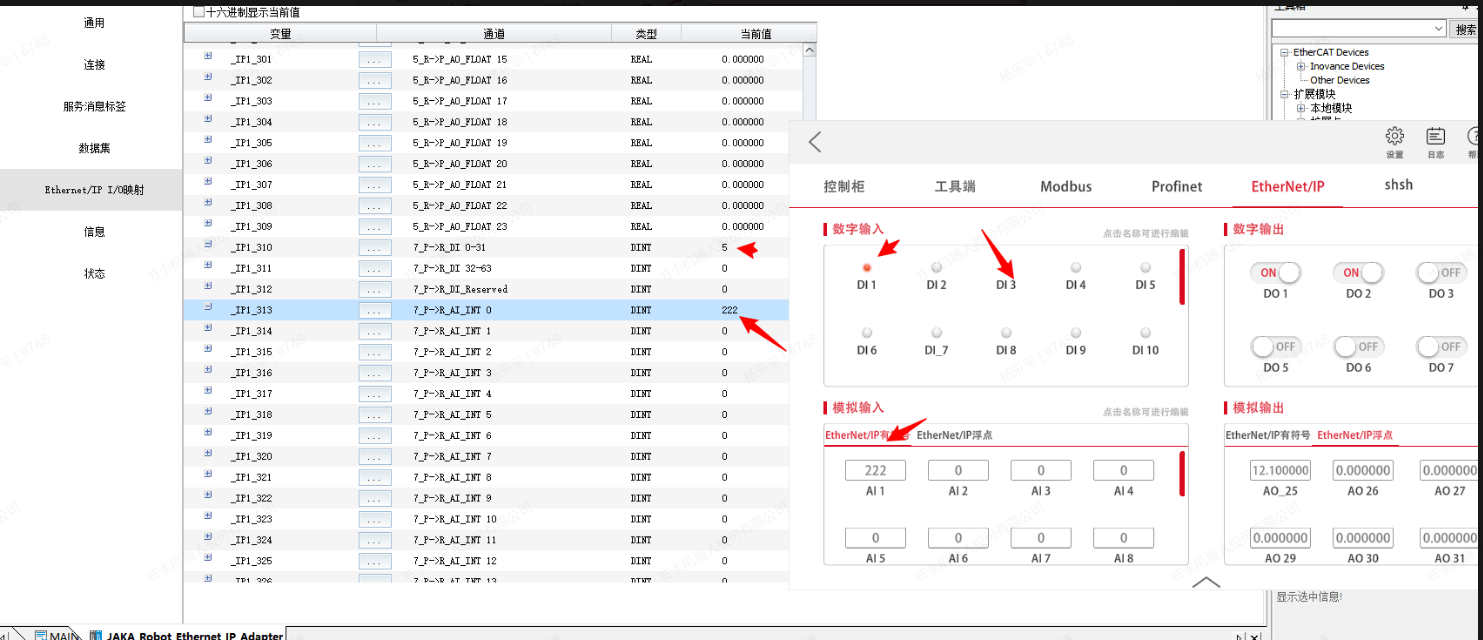
- 从PLC输出数据到机器人
# Modbus TCP
# 从站
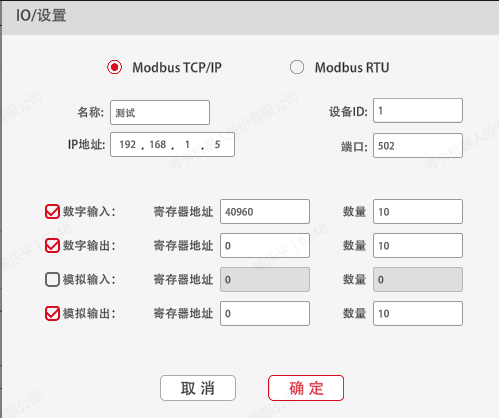
- Easy-522作为从站时,设置IP地址即开启了Modbus从站功能,无需设置通信协议,配置JAKA的扩展IO,使用502端口即可和Easy-522通信
- Easy-522的文档规定了线圈和寄存器可以访问的地址,线圈和寄存器共用地址。
# 主站
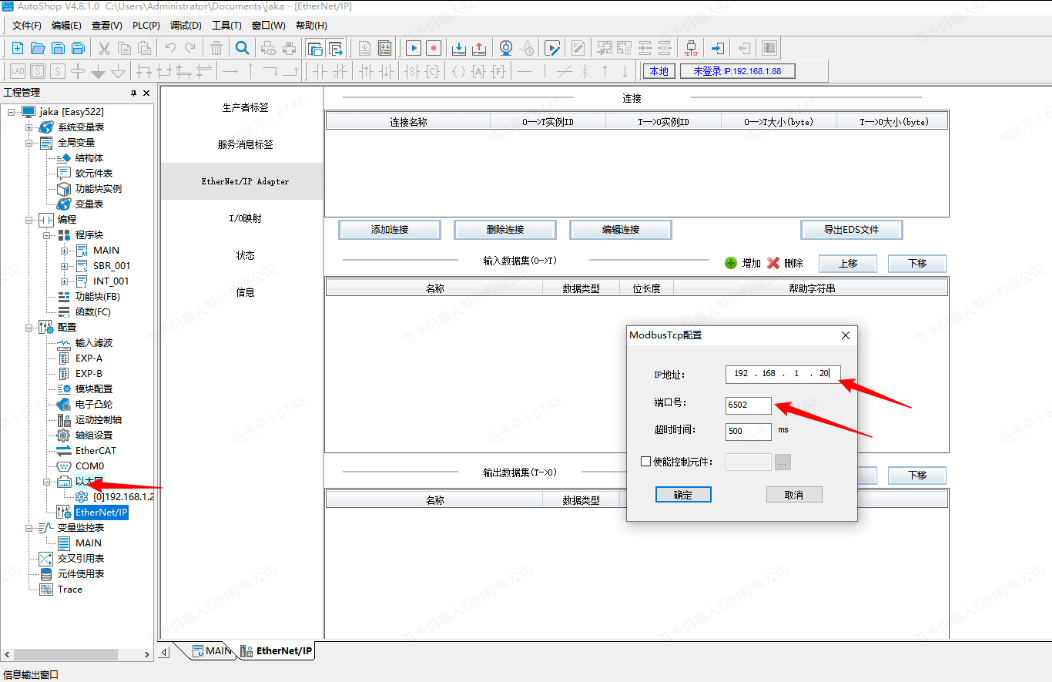
- Easy-522作为主站,添加以太网配置,参数为JAKA机器人的地址和Modbus端口
- 右键打开并新增从站站号,分别进行配置,分配映射地址后点击确认
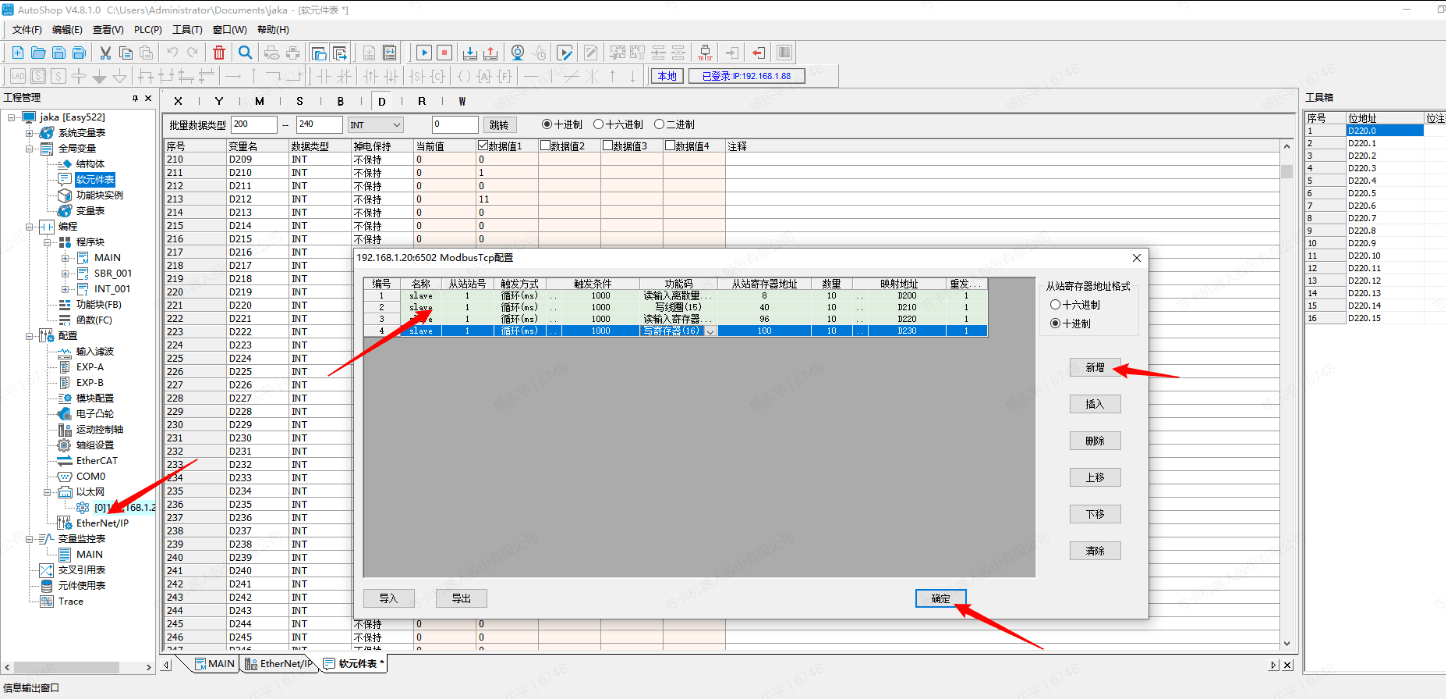
- 打开软元件表,监视D200-D240的值,按照上图的分配,地址映射如下:
DO 0-9 : D200-209
DI 0-9 : D210-D219
AO 0-9 : D220-229
AI 0-9 : D230-D239
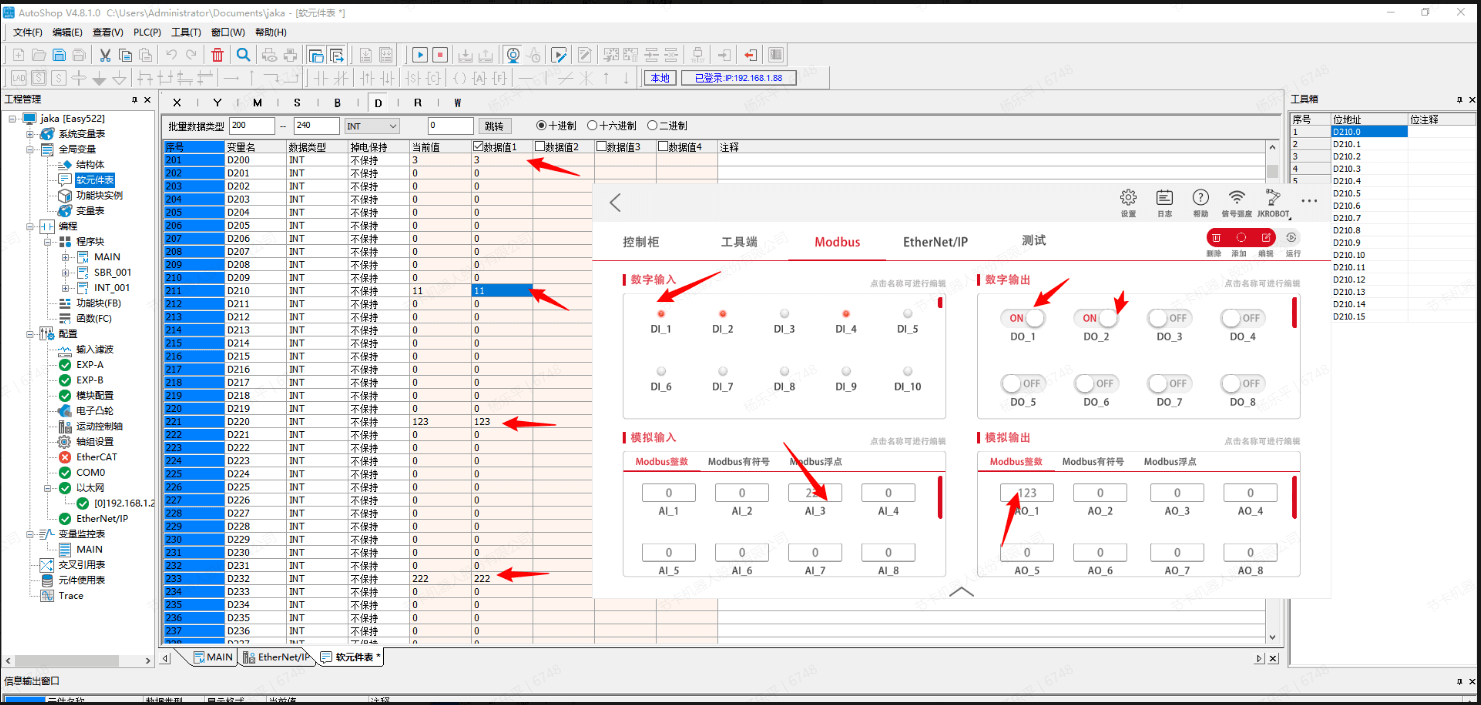
分别使用读取内存和写入内存可以观察值的更新
# Codesys
# EtherNet/IP
- 下载并安装codesys后,会在后台出现CODESYS Gateway Systray -x64和CODESYS Control Win Systray -x64,前者是网关的开关,后者为虚拟PLC的开关,使用时需要确保二者都处于运行状态。

- 打开Codesys并新建工程,选择standard project,首次使用codesys会提示创建用户,之后使用plc时均需要使用此信息进行用户登录。


- 选择CODESYS Control Win V3 x64作为PLC型号,第二栏默认即可。

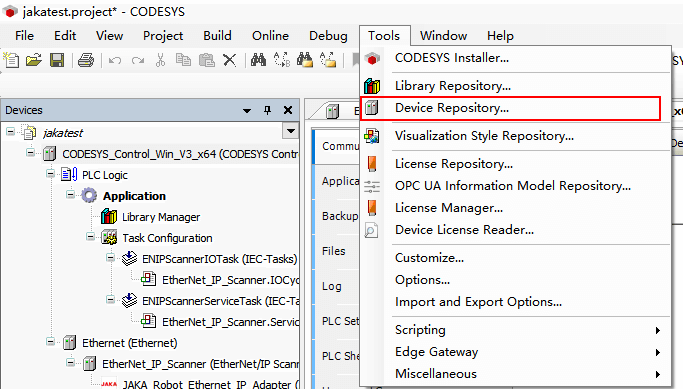
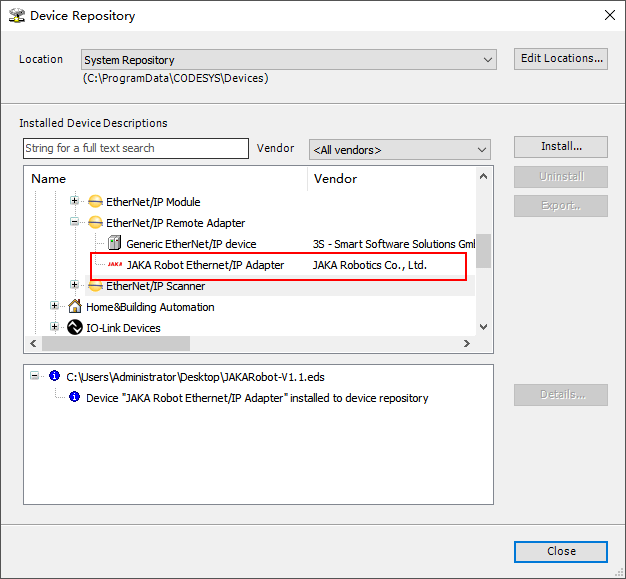
- 在Codesys 菜单栏-工具-设备存储库,点击“安装”导入eds文件。导入后会出现提示,同时文件会出现在EthernetIP总线的远程适配器下。
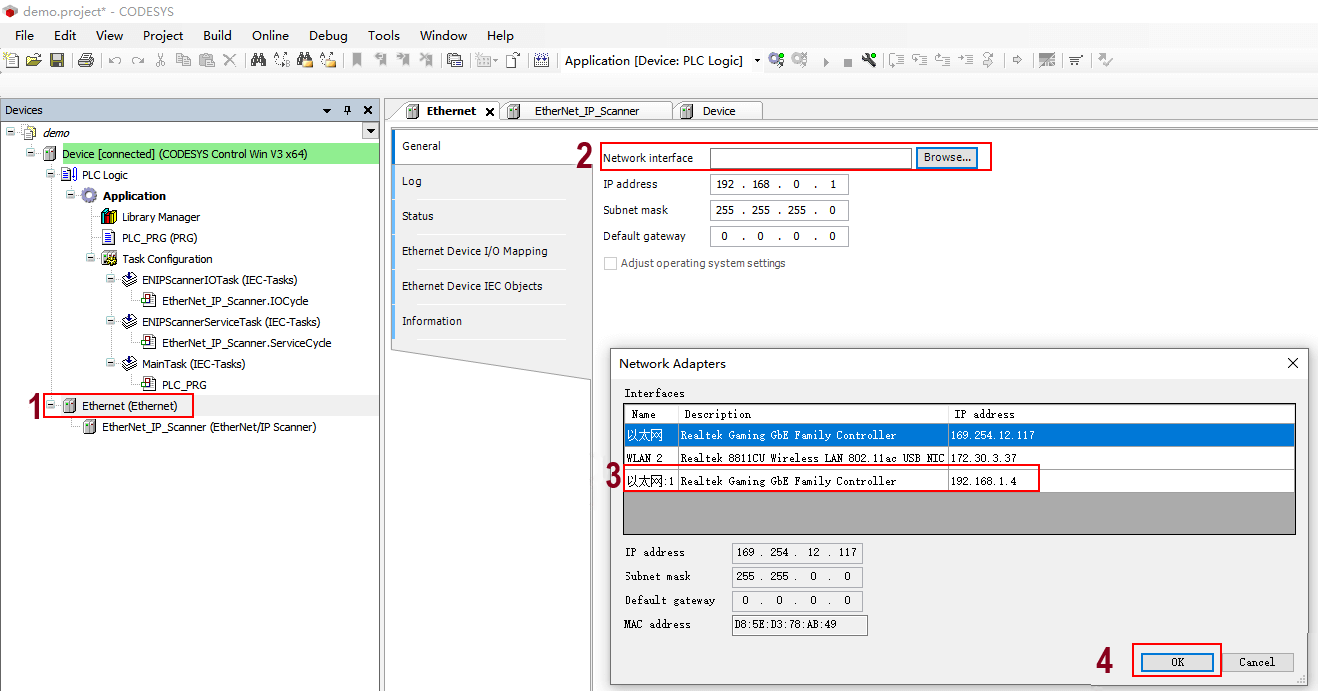
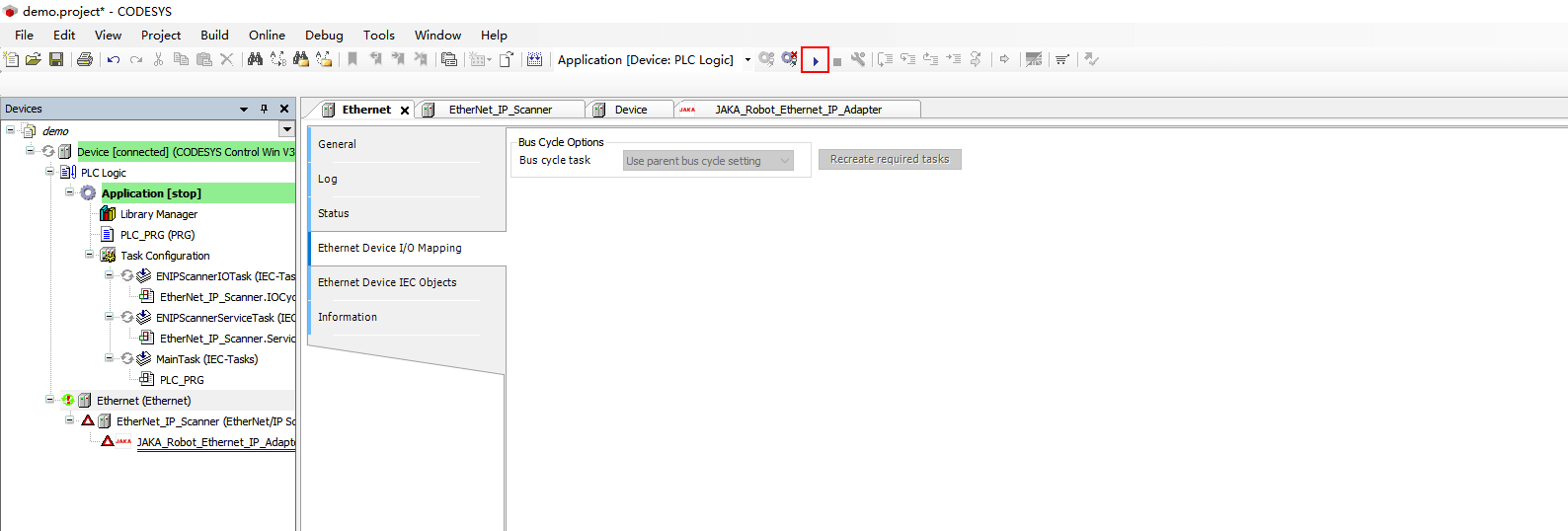
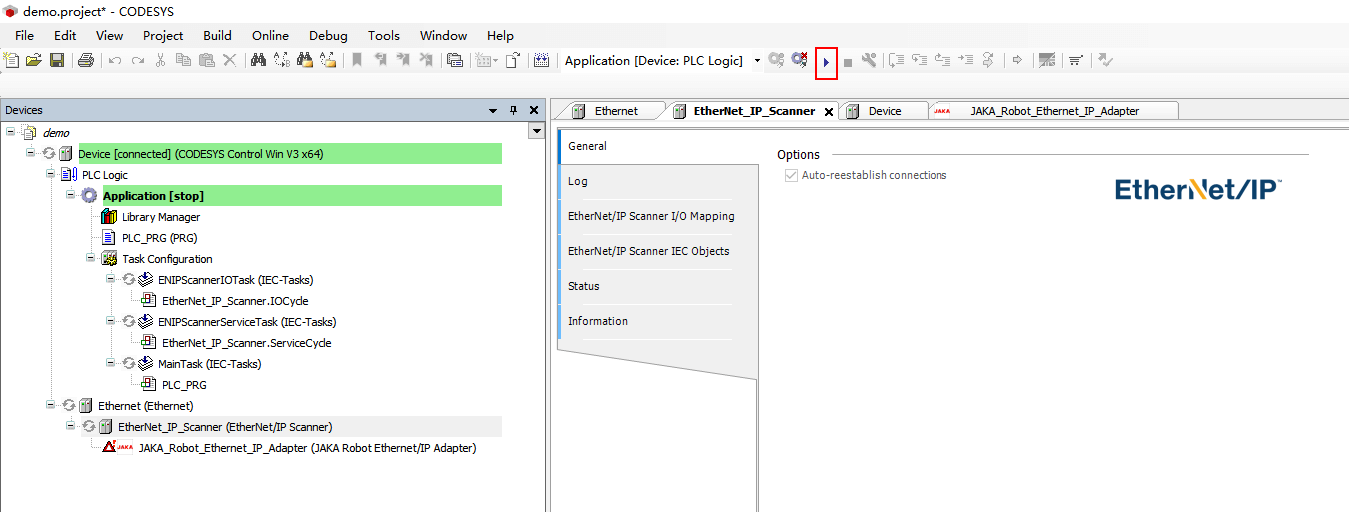
- 在Codesys中分别逐级添加EtherNet->EtherNet_IP_Scanner。

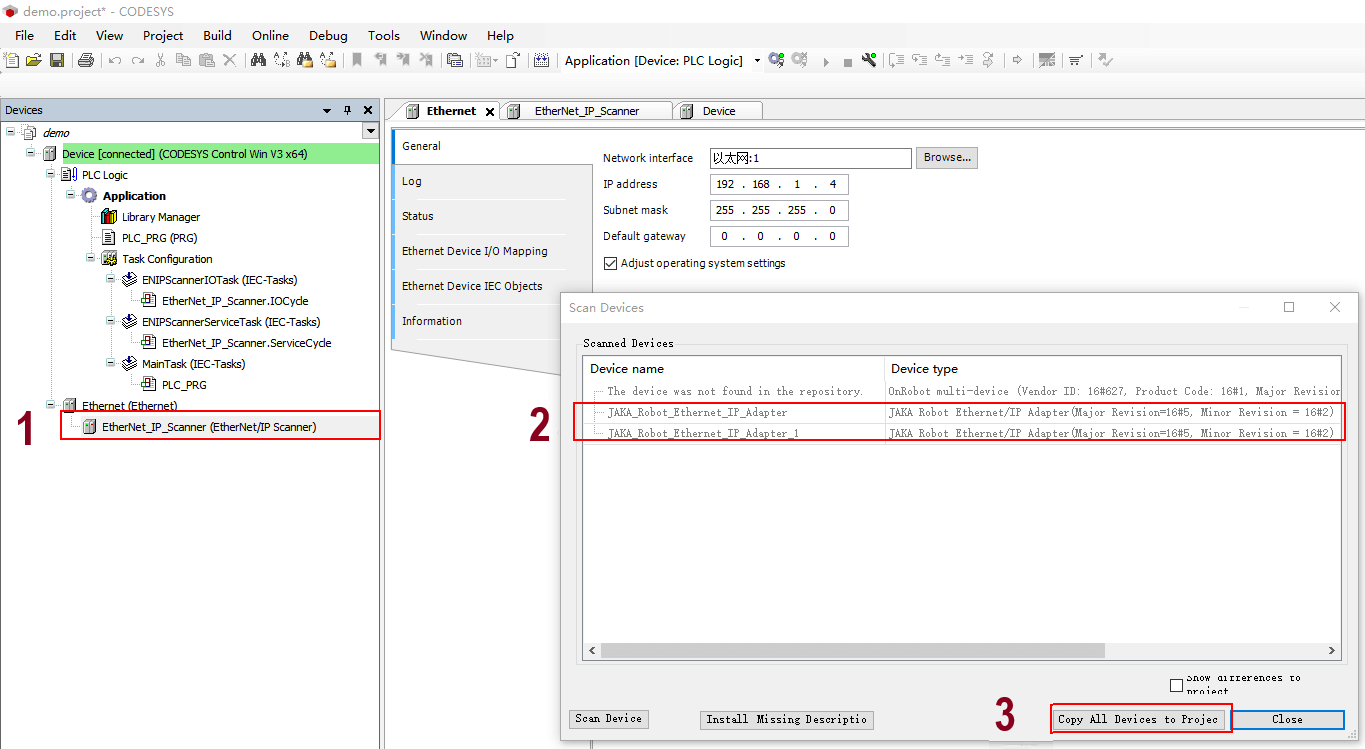
- 双击EtherNet选择与外部设备相连的网口,点击ok。如果组网中已有匹配该eds文件的JAKA控制器,并且使能了EtherNet/IP功能,右键单击EtherNet_IP_Scanner进行设备扫描,可以看到符合条件的设备,单击复制到工程;如果未成功扫描,也可以手动添加设备并配置其IP地址。
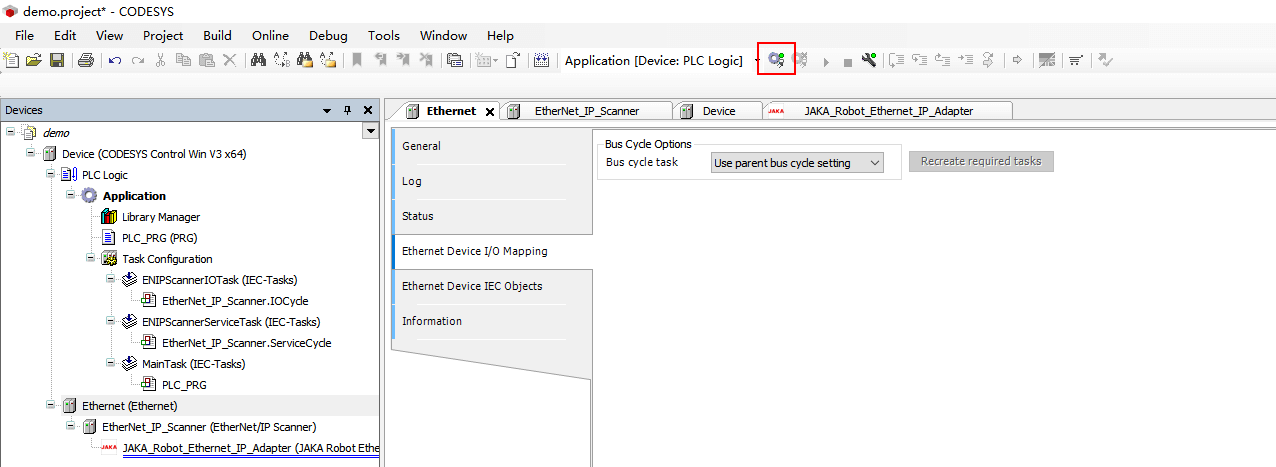
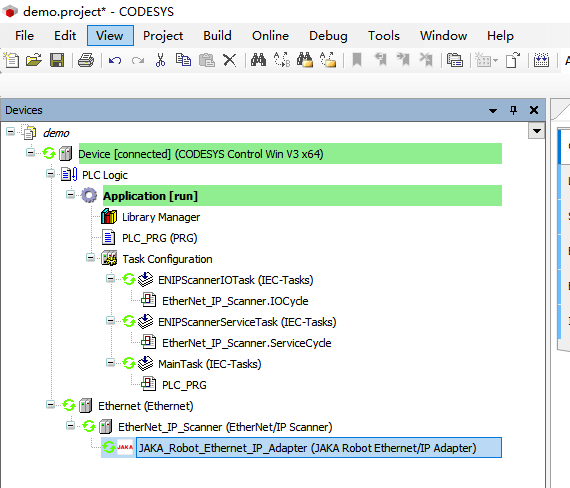
- 依次点击登录和运行按钮,当设备栏的scanner和adapter均变为绿色后,代表设备成功连接,此时APP侧应同步显示成功连接主站。

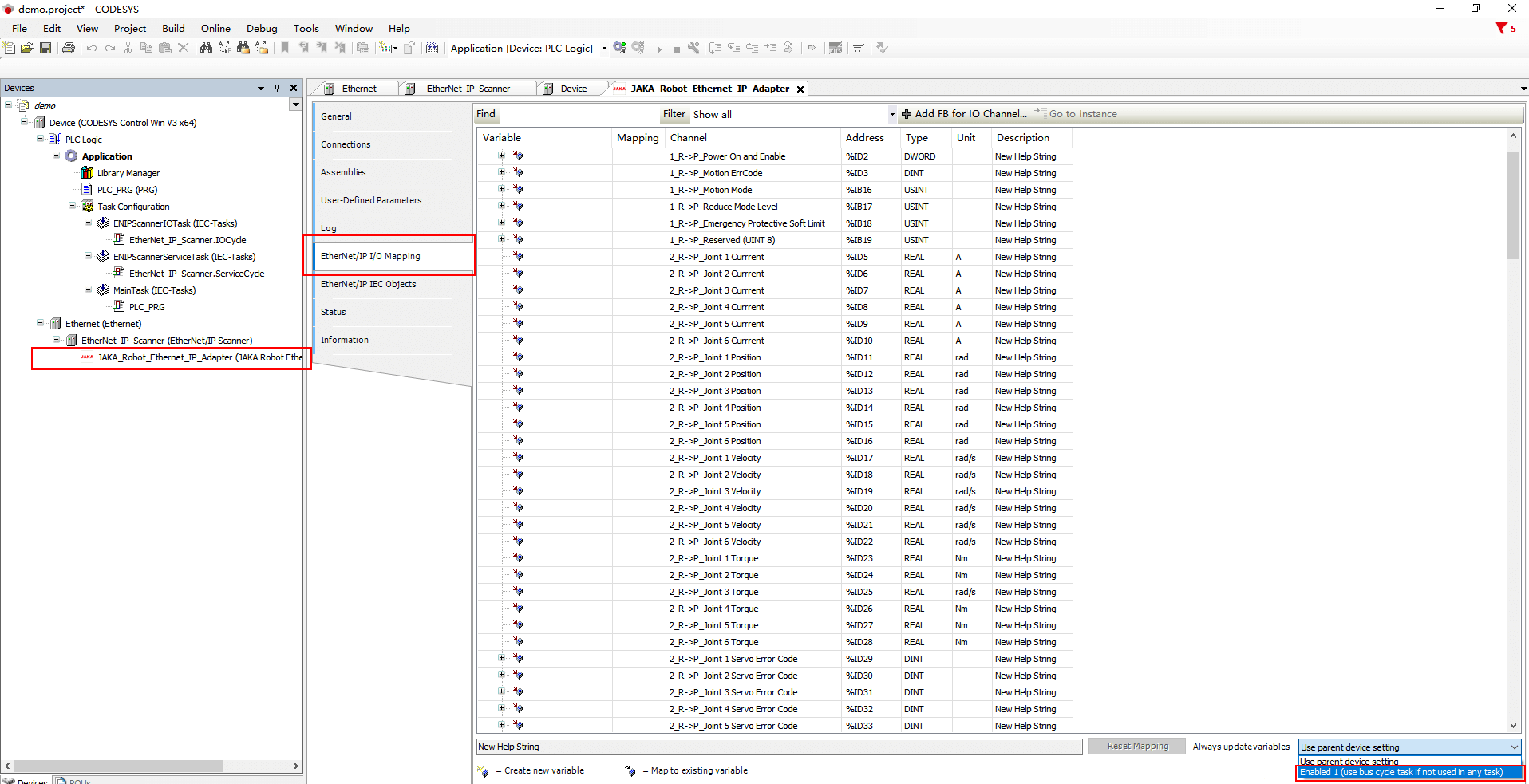
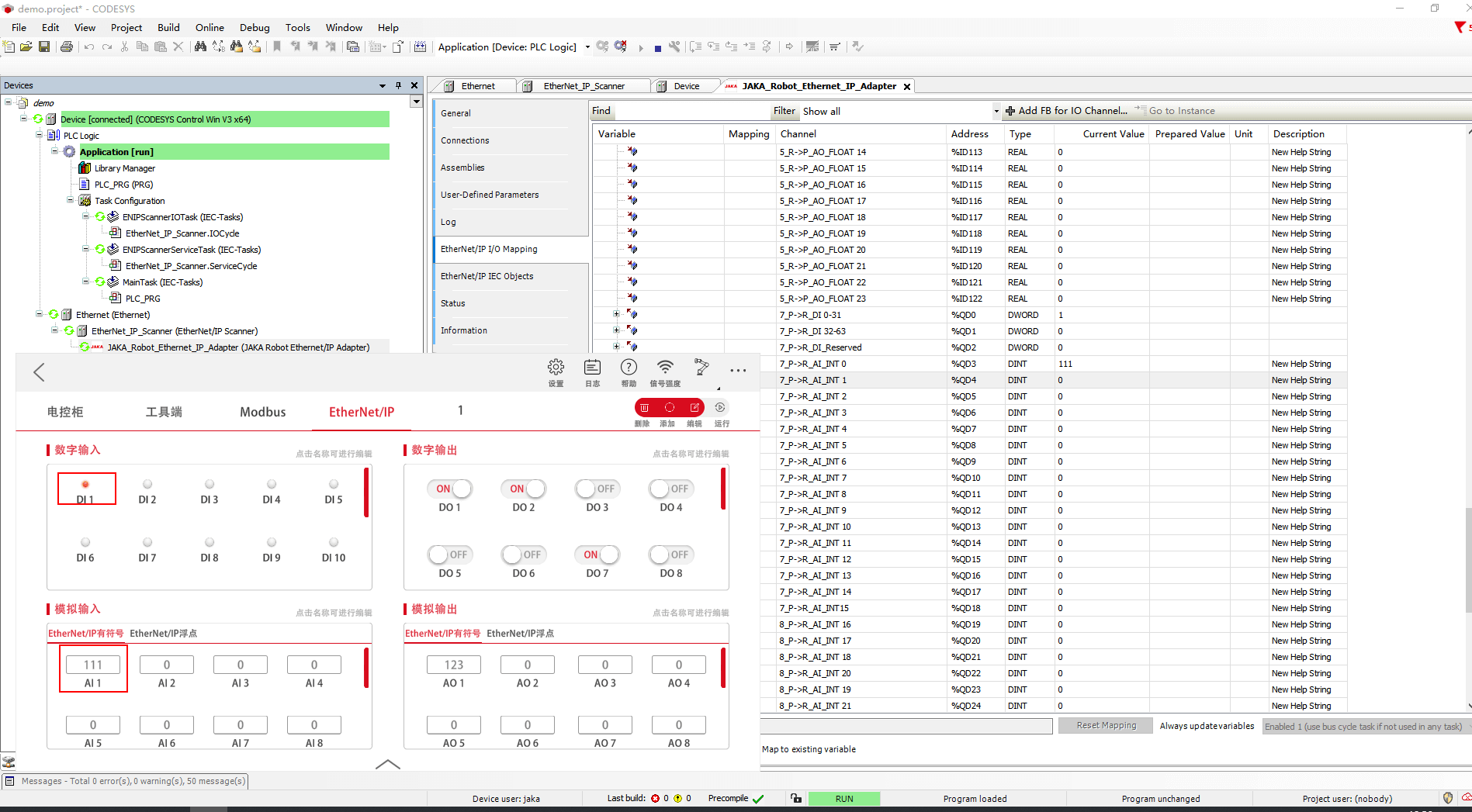
- 打开jaka adapter的IO映射将总是更新处改为使能1,修改此选项需要先退出PLC登录。再次登录可以发现,数据已经开始同步更新。
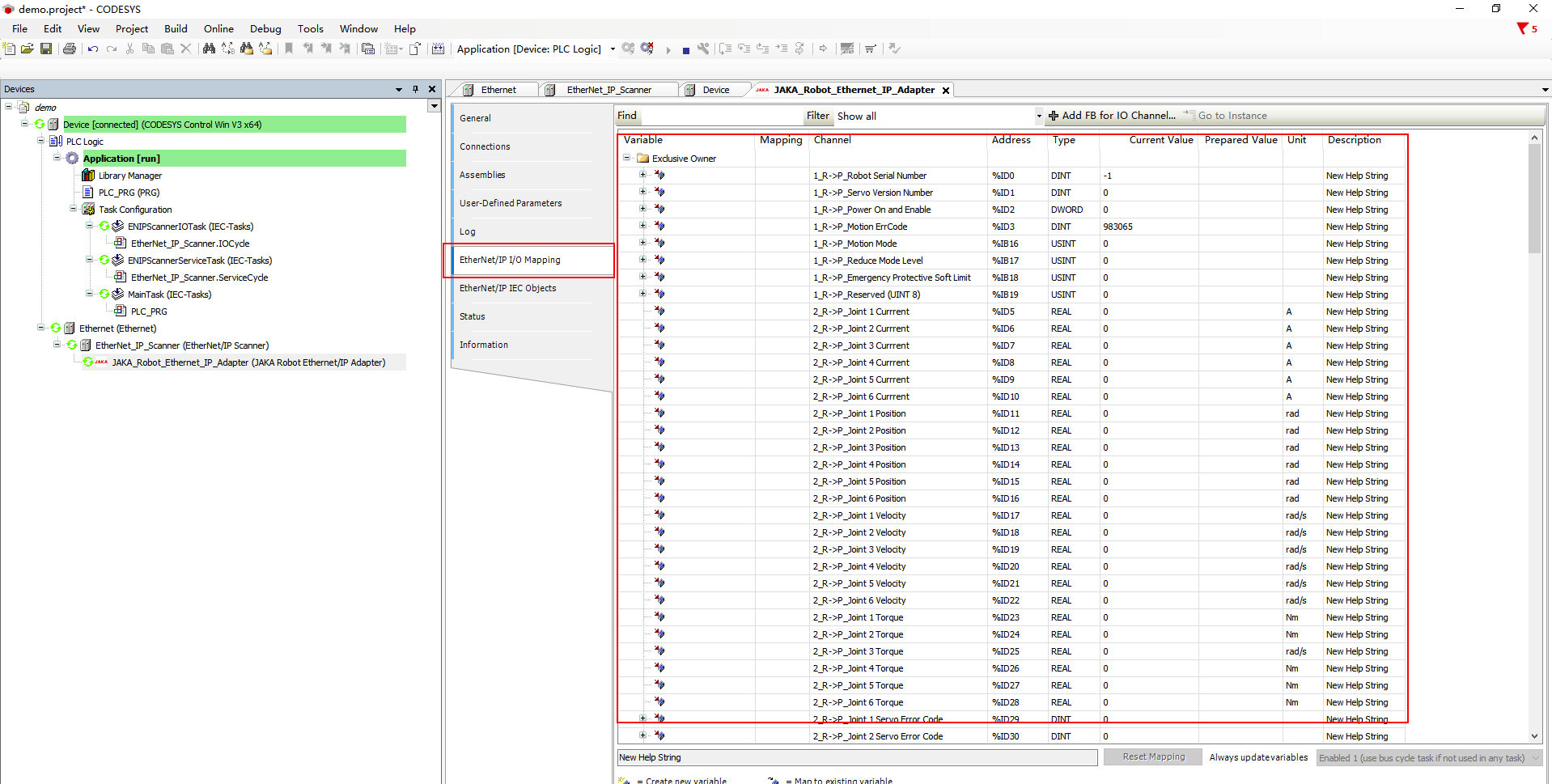
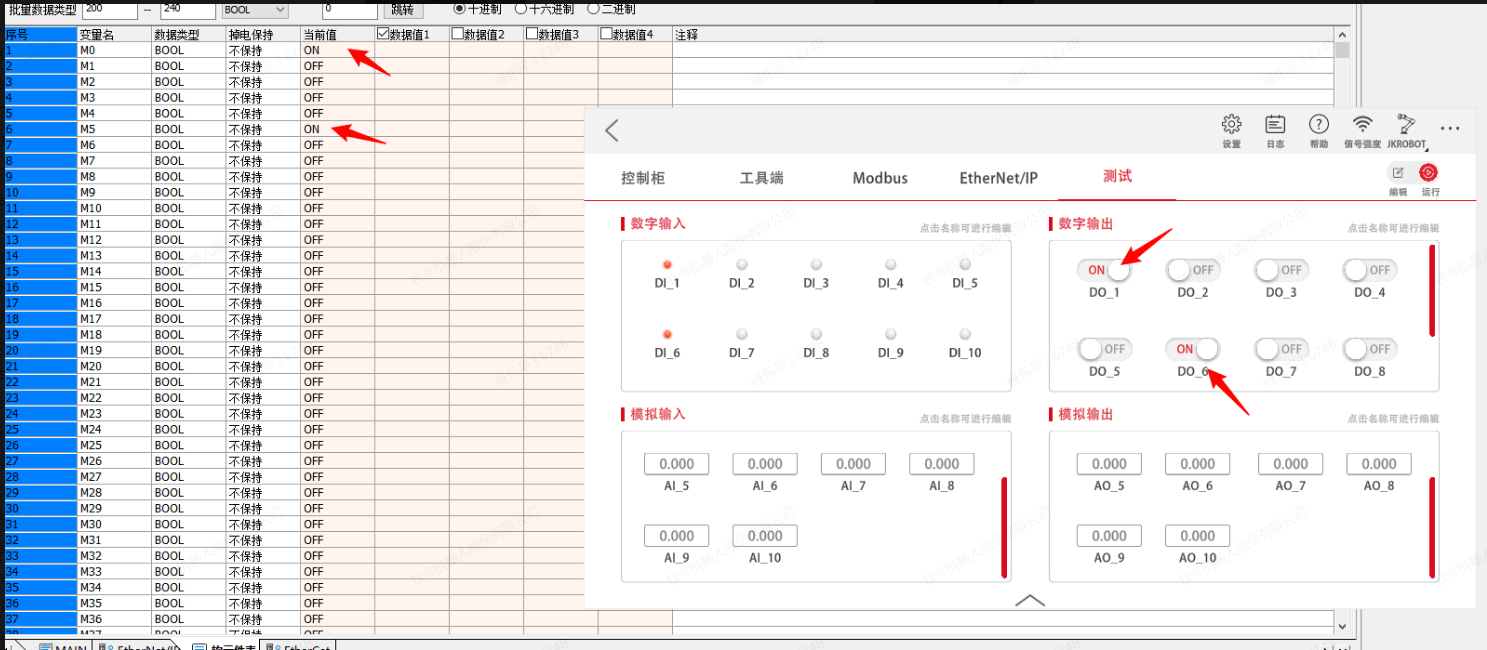
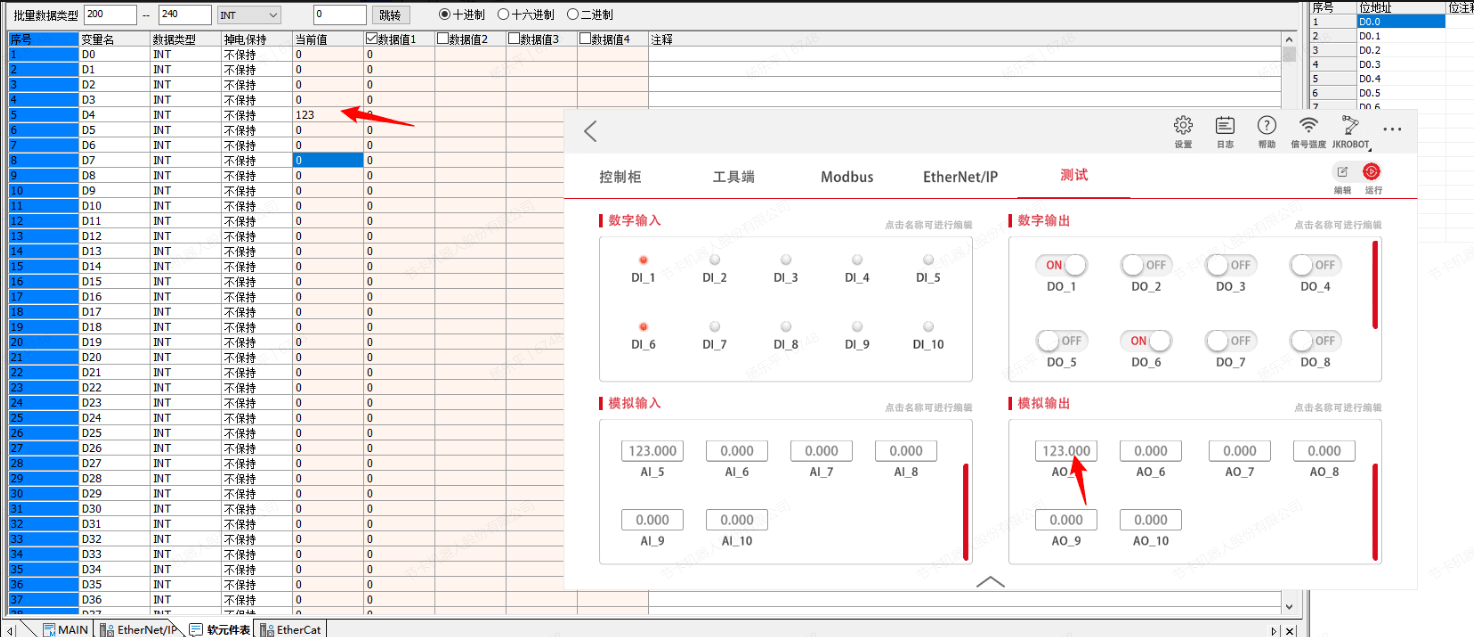
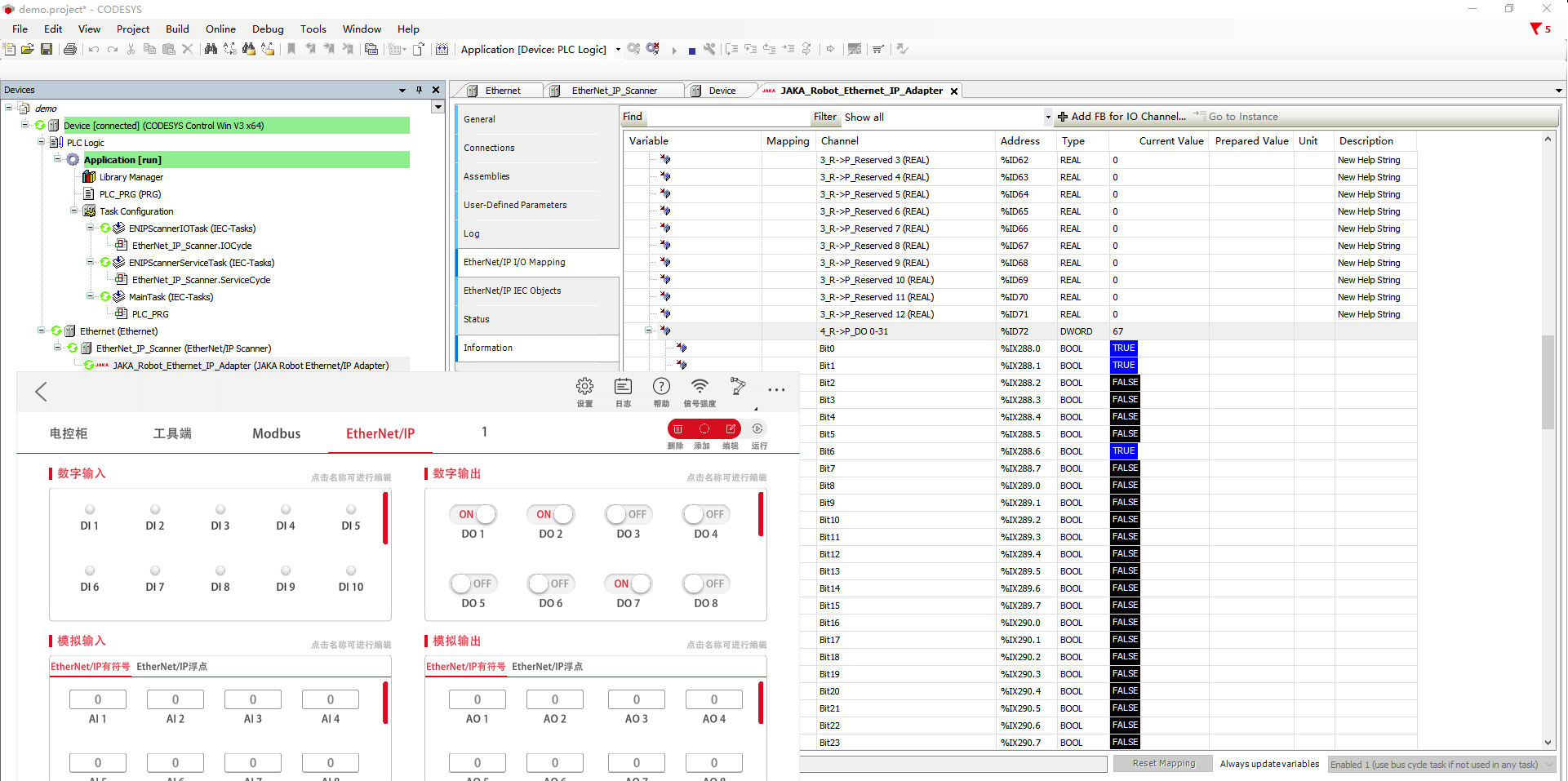
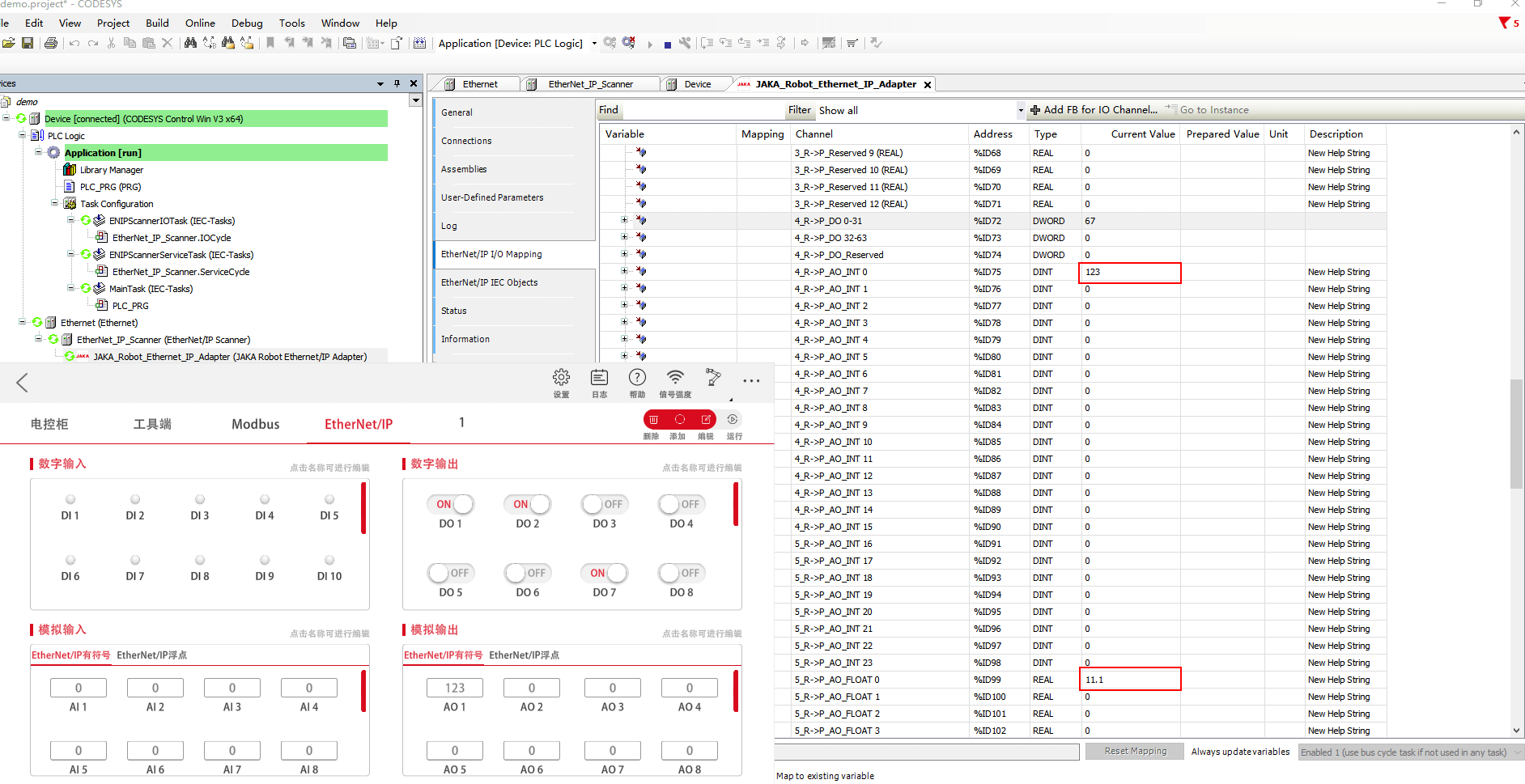
- 从控制器到PLC,分别修改DO和AO的数据,可以看到,对应地址的参数发生了更新。
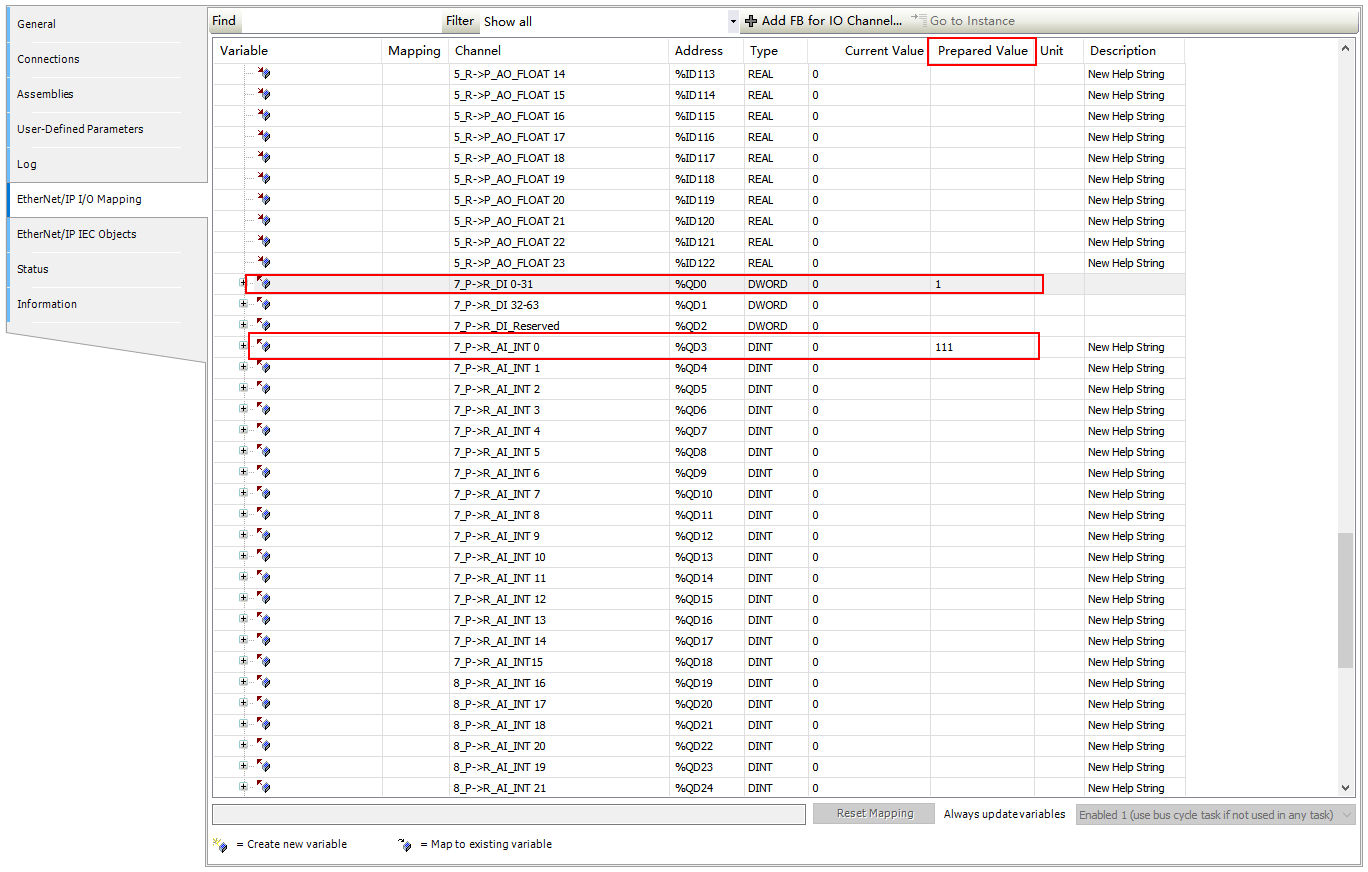
- 从PLC到控制器,分别在预备值栏修改DI和AI的值,并同时按下ctrl+F7将数据提交,可以看到对应的数据发生了更新。
# 总结
目前已验证的PLC型号与对应的通讯协议汇总如下:
| 型号 | 厂商 | Modbus TCP | EtherNet/IP(scanner) | Profinet(controller) |
|---|---|---|---|---|
| 5370 L3 1769-L33ER | 罗克韦尔 | √ | √ | |
| 6ES7317-2EK14-0AB0 | 西门子 | √ | √ | √ |
| FX5U-80MT/DSS | 三菱 | √ | √ | |
| TM241CE24R | 施耐德 | √ | √ | |
| CP1H-X40DT-D | 欧姆龙 | √ | ||
| KV-8000 | 基恩士 | √ | √ | |
| AS228T-A | 台达 | √ | √ | |
| Easy522‑0808TN | 汇川 | √ | √ |
针对上述测定的PLC型号,通讯协议与节卡目前所支持的主从协议均良好兼容,可以正常使用。需要注意的是,由于各PLC厂家对数据类型和长度的规定,可能无法做到完全兼容,需要对数据做拼接等处理。
# 问题排查
出现无法连接或无法使能的情况,可以按以下条目进行初步分析和处理。
# 检查设备网段是否相同
检查设备是否处于同一网段,可以使用wireshark抓包分析,也可以使用ping对网络进行测试,确保设备之间通信状况良好。
# 从APP确认EtherNet/IP的状态
修改EtherNet/IP使能状态和网络状态后,需要重启控制器以更新配置,Profinet同理,可以在APP相应设置界面查看是否处在与主站交互的状态,并是否判断连接。
# 检查接线是否正常
与PLC连接时,推荐使用控制柜底部网口,此时APP应通过Wi-Fi或控制柜前面板网口连接,以保证通信质量。
# 从PLC查看状态
通过上位机软件监测PLC的状态,确认其处于运行状态并且正常工作,如Codesys数据更新的前提是打开数据映射选项的”使能1“。
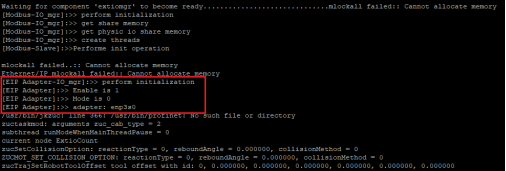
# 查看终端界面打印信息
在终端界面上使用jkzuc命令重启控制器,查看EtherNet/IP的相关打印信息,包括使能状态、IO配置模式、网卡名称、IP地址、与master连接状态等,确认信息是否匹配或正常。