# 功能IO
# 功能IO介绍
在I/O界面中可以对DI进行功能设置,在功能选择框下拉选择该DI所想设置的功能,点击“确认”,当该DI信号被触发时,则启动该功能。目前DI信号支持功能有:启动程序、暂停程序、继续运行程序、停止程序、打开电源、关闭电源、机器人上使能、机器人下使能、一级缩减模式、二级缩减模式、防护停止、回初始位置、清除故障、进入拖拽和退出拖拽功能。功能触发条件,如下表所示:
| 功能名称 | 触发方式 |
|---|---|
| 启动程序 | 上升沿信号 |
| 暂停程序 | 上升沿信号 |
| 继续运行程序 | 上升沿信号 |
| 停止程序 | 上升沿信号 |
| 打开电源 | 上升沿信号 |
| 关闭电源 | 上升沿信号 |
| 机器人上使能 | 上升沿信号 |
| 机器人下使能 | 上升沿信号 |
| 一级缩减模式 | 低电平信号 |
| 二级缩减模式 | 低电平信号 |
| 防护停止 | 低电平信号 |
| 回初始位置 | 上升沿信号 |
| 清除故障 | 上升沿信号 |
| 进入拖拽 | 上升沿信号 |
| 退出拖拽 | 上升沿信号 |
注:
清除故障只清除碰撞报警,其他异常报警无法清除。
二级缩减倍率应小于一级缩减倍率,在【设置】→【安全设置】→【防护系统】中进行设置缩减倍率。
NPN为输入24V OFF,PNP为输入24V ON。
在I/O界面中可以对DO进行功能设置,在功能选择框下拉设置DO所绑定的系统预定义的状态量,点击确认后,该DO信号将实时反映所绑定的系统状态量的状态。目前DO信号支持绑定的状态有:空闲、程序暂停、程序运行、错误、已上电、已使能、运动中、静止、已开机、系统急停按钮状态、机器人缩减状态、系统保护性停止状态、安全位置等。
不同状态下的信号状态如下表:
| 机器人状态 | 信号状态 |
|---|---|
| 空闲 | 高电平信号 |
| 程序暂停 | 高电平信号 |
| 程序运行 | 高电平信号 |
| 错误 | 高电平信号 |
| 已上电 | 高电平信号 |
| 已使能 | 高电平信号 |
| 运动中 | 高电平信号 |
| 静止 | 高电平信号 |
| 已开机 | 高电平信号 |
| 系统急停按钮状态 | 高电平信号 |
| 机器人缩减状态 | 高电平信号 |
| 系统保护性停止状态 | 高电平信号 |
| 安全位置 | 高电平信号 |
注:
空闲状态为机器人未运行程序状态,与机器人本体状态无关。
错误状态为机器人触发碰撞报警状态。
运动中状态为机器人处于运动(运行程序运动,手动控制,二次开发控制运动等等)状态便会触发,与程序状态无关。
静止状态为机器人处于静止(程序暂停,未运行程序,程序结束,等待信号等等)状态,与程序状态无关。
已开机状态为控制柜处于上电开机状态,与机器人本体状态无关。
机器人缩减状态为机器人是否触发二级缩减模式状态。
安全位置状态DO为用户在安全设置中姿态设置自定义配置的位置,当机器人处于此位置时,会触发此信号。
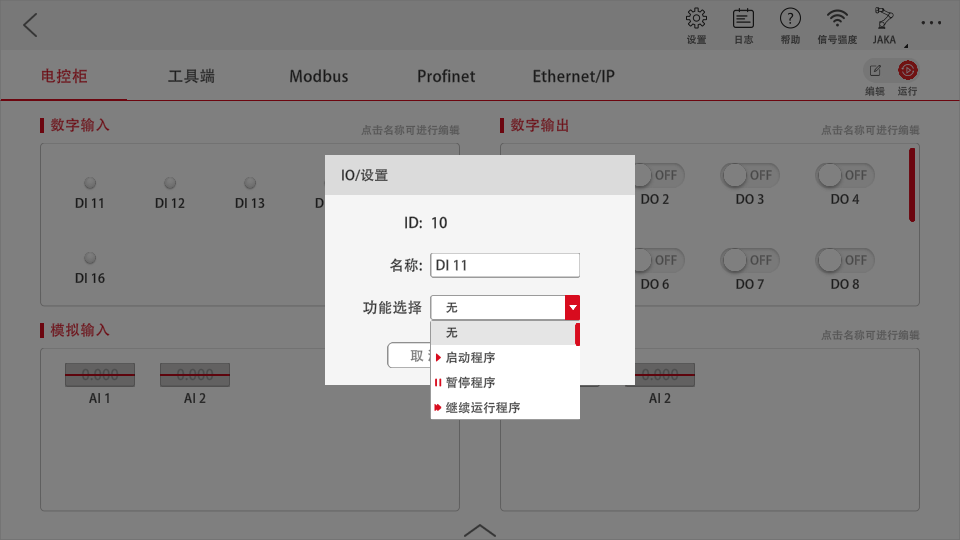
功能DI示意图
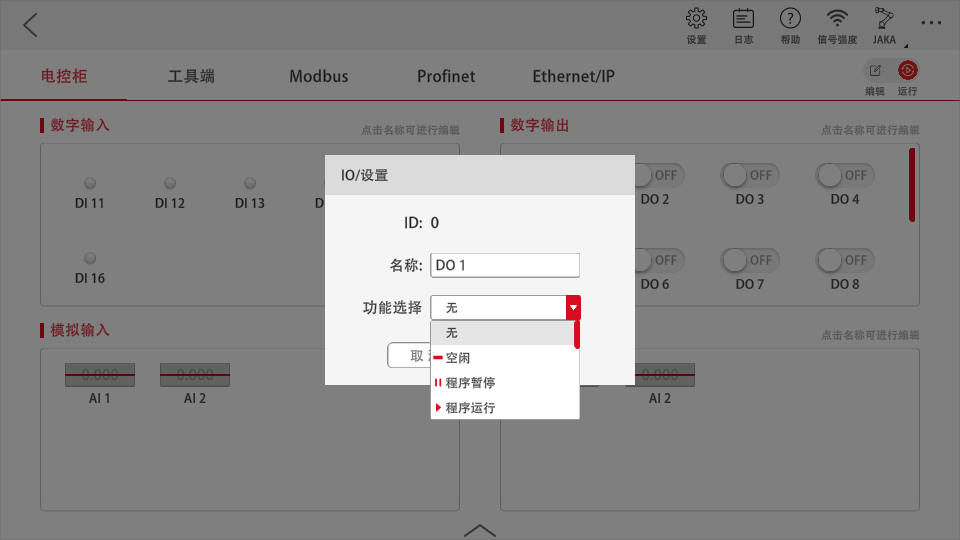
功能DO示意图